Graphics Reference
In-Depth Information
for real numbers s and t. This equation can be rewritten as
(
)
sa
vv
-=-
t
1
s
C
.
(2.1)
1
2
Since
v
1
and
v
2
are linearly independent, s cannot be 1 and equation (2.1) has a unique
solution for s and t. Let
B
=
P
+ s
PA
.
2.2.4. Lemma.
A motion M is a one-to-one and onto map.
Proof.
The first part, that M is one-to-one, is easy, because if the distance between
the images of two points under M is zero, then so is the distance between the two
points by the definition of a motion.
Showing that M is onto is harder and we only prove it in the planar case here.
See [Gans69] for the general case. We begin by proving a stronger version of Theorem
2.2.1 (3).
Claim.
M maps lines
onto
lines.
Let
L
be a line. We already know that M(
L
) is contained in a line
L
¢. Let
C
¢ be any
point of
L
¢. We must show that there is a point
C
in
L
with M(
C
) =
C
¢. To this end,
choose any two distinct points
A
and
B
of
L
and let (
A
¢
,B
¢) = M(
A,B
). Then
C
¢
=
A
¢
+
t
A
¢
B
¢ for some t. It follows from Lemma 2.2.2 that
C
¢
= M(
A
+ t
AB
) and the claim is
proved.
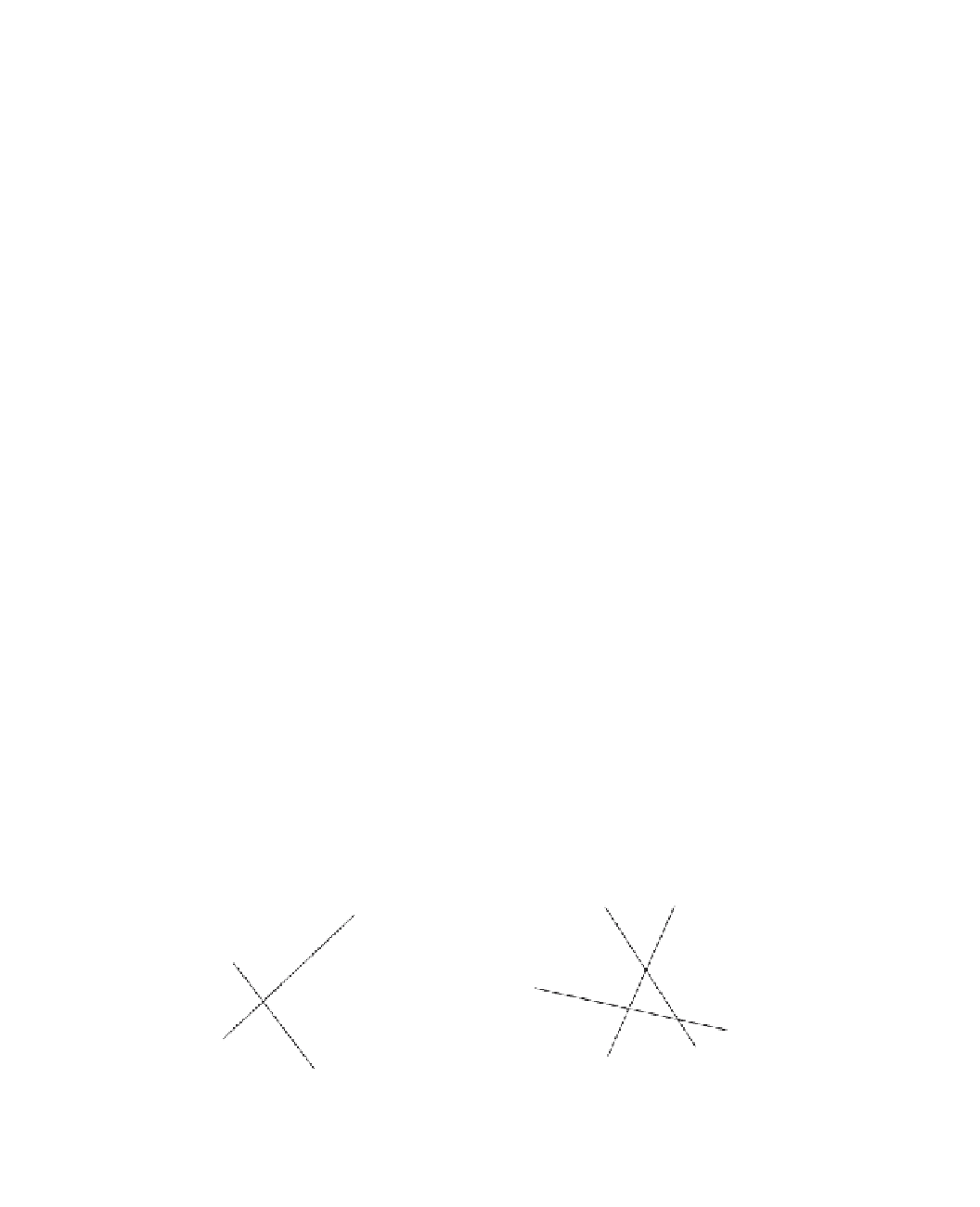
We are ready to prove that planar motions are onto. See Figure 2.2. Let
P
¢ be any
point of
R
2
. We must show that
P
¢ = M(
P
) for some point
P
. Take three noncollinear
points
A, B,
and
C
and let (
A
¢
,B
¢
,C
¢) = M(
A,B,C
). Let
L
1
¢ be the line that contains the
points
A
¢ and
B
¢ and let
L
2
¢ be the line that contains
A
¢ and
C
¢. We just showed that
all the points on these two lines are in the image of M. Assume that
P
¢ is not on these
two lines. By Lemma 2.2.3 there are two points
D
¢ and
E
¢ on these lines so that
P
¢ is
on the line
L
¢ determined by
D
¢ and
E
¢ and hence in the image of M. The planar case
of Lemma 2.2.4 is proved.
Although much of what we shall prove about motions depends only on their dis-
tance-preserving property and not on their domain, the domain
can
be important.
The following example shows that Lemma 2.2.4 definitely uses the fact that the
domain of the motion is all of the plane:
P¢
B
B¢
D¢
C
C¢
E¢
L
2
¢
A¢
A
L
1
¢
L¢
Figure 2.2.
Proving motions are onto maps.