Graphics Reference
In-Depth Information
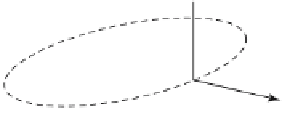
The cylindrical frame field on
R
3
.
Figure 9.36.
U
3
U
2
U
1
with respect to some open subset (submanifold) of
R
3
. In fact, any set for which one
can make sense of the differentiability of functions would be adequate.
9.16.8. Example.
To compute the connection forms for the
cylindrical frame field
(
U
1
,
U
2
,
U
3
) on
R
3
defined by
()
=
(
)
( )
+
(
)
( )
Up
cos
q
Ep
sin
q
E p
1
1
2
()
=-
(
)
( )
+
(
)
( )
Up
sin
q
Ep
cos
q
Ep
2
1
2
()
=
()
Up Ep
,
3
3
where points are expressed in cylindrical coordinates (r,q,z). See Figure 9.36.
Solution.
Note that this field is not defined along the z-axis, but as long as we stay
away from that axis everything that we did applies. Let
v
be a tangent vector at the
point
p
. By definition
()
=
(
(
)
)
( )
+
(
(
)
)
( )
—
Up
D
cos
q
Ep
D
sin
q
E p
v
1
v
1
v
2
()
=-
(
(
)
)
( )
+
(
(
)
)
( )
—
Up
D
sin
q
Ep
D
cos
q
Ep
v
2
v
1
v
2
()
=
—
Up 0
.
v
3
All that is left to do is to substitute into the formulas
( ()
=—
()
∑
(
.
w
ij
pv
Up Up
v
i
j
For example,
( ()
=
(
(
(
)
)
( )
+
(
(
)
)
( )
)
∑-
(
(
)
( )
+
(
)
( )
)
w
pv
D
cos
q
Ep
D
sin
q
Ep
sin
q
Ep
cos
q
Ep
12
v
1
v
2
1
2
(
)
(
)
+
(
)
(
)
=-
sin
q
D
cos
q
cos
q
D
sin
q
.
v
v
Using the relationships
(
)
=-
(
)
( )
D
cos
q
sin
q
d
q
v
v
(
)
=
(
)
( )
D
sin
q
cos
q
d
q
v
v