Graphics Reference
In-Depth Information
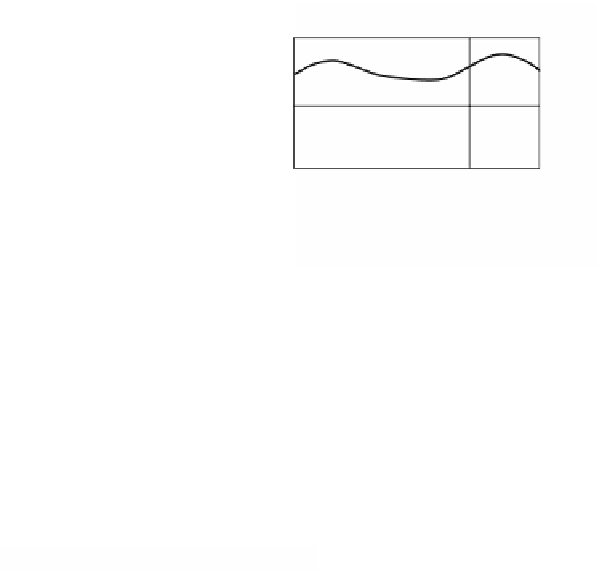
Figure 8.28.
Cross-sections.
cross-section s
s(b)
E
zero section
p
B
b
b
Œ
B
. The
support
of a cross-section s, denoted by support(s), is defined to be the set
of
b
Œ
B
with s(
b
) π
0
. Two cross-sections s
1
and s
2
are said to be
linearly independ-
ent
if s
1
(
b
) and s
2
(
b
) are linearly independent vectors in p
-1
(
b
) for every
b
Œ
B
.
See Figure 8.28. It is easy to see that the set of cross-sections of a vector bundle
x is actually a vector space. In fact, if s is a cross-section of x and f is a real-valued
function on the base space
B
of x, then we can define a new cross-section fs for x by
means of the obvious formula
( ()
=
fs
bbb
f
()()
s
,
for all
bB
Œ
.
Note.
Every vector bundle has the zero cross-section. One often identifies the base
space of a vector bundle with the image of this zero cross-section in the total space,
namely, the space of zero vectors in all the fibers.
Next, we define what is meant by a map between vector bundles. Such a map
should preserve fibers and the vector space structure.
Definition.
Let x
i
= (
E
i
,p
i
,
B
i
) be vector bundles (of possibly different dimensions). A
vector bundle map
F:x
1
Æx
2
is a pair of maps (
˜
,f), so that
(1) the diagram
˜
f
E
ææ
E
1
2
p
Ø
Ø
p
1
2
f
B
ææ
B
1
2
commutes, that is, p
2
˜
= f p
1
, and
(2) the
fiber maps
o
o
˜
˜
-
1
-
1
-
1
()
=
()
()
Æ
(
()
)
f
F
b
f
p
b
:
p
b
p
f
b
1
1
1
1
1
2
1
are linear transformations with respect to the vector space structure on each
fiber for all
b
1
Œ
B
1
.