Graphics Reference
In-Depth Information
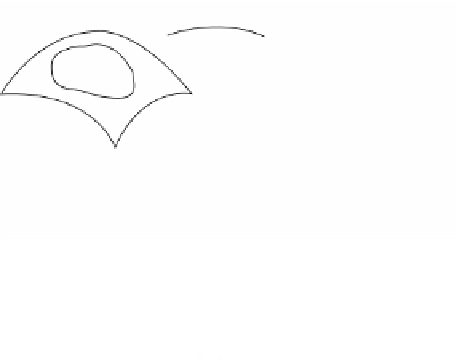
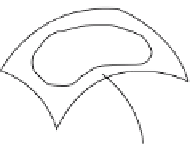
Figure 8.27.
Differentiability of maps
between manifolds.
f
M
n
N
k
U
i
q = f(p)
p
V
j
y
j
j
i
R
k
R
n
-1
y
j
j
i
° f °
is a C
r
map for all i and j. A C
•
map is called a
differentiable
map. If r ≥ 1, then the
rank of f at a point
p
of
M
n
is defined to be the rank of D(y
j
f j
i
-1
) at
p
where
U
i
is
a neighborhood of
p
and
V
j
is a neighborhood of f(
p
). If
A
Õ
M
n
, then the set of C
r
maps f :
A
Æ
R
will be denoted by C
r
(
A
).
o
o
See Figure 8.27. Differentiability and rank are well-defined local properties. One
can show that a map is differentiable if and only if for each
p
in
M
and some
U
i
and
V
j
that contain
p
and f(
p
) in their interior, respectively, the map y
j
f j
i
-1
is di-
ferentiable. In other words, if one has differentiability with respect one pair of neigh-
borhoods one has it for all. Furthermore, once one has a notion of a C
r
map and its
rank, the terms of
immersion
,
imbedding
,
diffeomorphism
, and
submanifold
are defined
as before and we do not duplicate the definitions here.
Manifolds admit different differentiable structures, but just because they are dif-
ferent does not mean that the resulting differentiable manifolds are not diffeomor-
phic. Calling two different differentiable structures on a manifold to be
equivalent
if
they define diffeomorphic differentiable manifolds defines an equivalence relation on
the set of differentiable structures. A famous problem that was largely solved in the
1960s and 1970s was to determine how many nonequivalent differentiable structures
a manifold admitted. The surprising answer is that it is more than one in general.
For example, the comment after Corollary 8.7.6 about the seven-dimensional sphere
S
7
can be interpreted as saying that
S
7
admits nonequivalent differentiable struc-
tures. In fact, one can show (see [FreL89]) that there are “fake”
R
4
s, that is, four-
dimensional manifolds that are homeomorphic to
R
4
but not diffeomorphic to it, so
that even as simple a space as
R
4
admits nonequivalent differentiable structures. (On
the other hand, this is also an example that the fourth dimension is special, because
there are no fake
R
n
s for n π 4.)
o
o
Note.
In light of the fact that a manifold can have different differentiable structures,
what happens in the case of some of the well-known spaces such as
R
n
,
S
n
, a torus,
etc.? When we treat them as differentiable manifolds, which differentiable structure
are we talking about? Well, these spaces invariably have some fairly “obvious” coor-
dinate neighborhoods associated to them and so one assumes that these are being
used for the differentiable structure and one never mentions differentiable structures
explicitly. Although there may be more than one “obvious” collection of coordinate
neighborhoods, they will lead to the same or diffeomorphic differentiable manifolds.