Graphics Reference
In-Depth Information
z
z
v¢
w
v
y
b
y
a
x
x
(a)
(b)
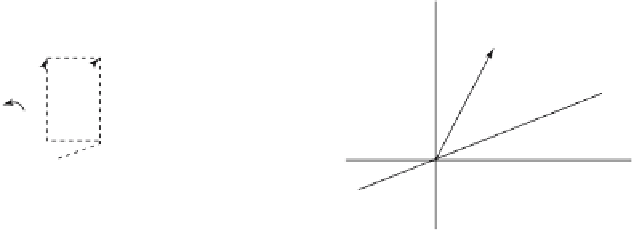
Figure 2.28.
Rotating a vector into the z-axis.
z
y
x
q
1
B(0,1,-3)
A(2,0,-3)
Figure 2.29.
Example 2.5.1.4.
3
2
xyz
++=
3
0
to the x-y plane.
Solution.
See Figure 2.29. The idea is to express R as a composite of our basic rota-
tions about the coordinate axes. Recall that motions map planes to planes and so to
define R we only need to define an R that does the right thing on three noncollinear
points in
X
. We shall use
O
= (0,0,0),
A
= (2,0,-3), and
B
= (0,1,-3) and deal with the
points
A
and
B
one at a time. Let R
1
be the rotation about the y-axis through an angle
q
1
defined by
2
13
3
13
cos
q
=
and
sin
q
=
.
1
1
The matrix for R
1
is