Graphics Reference
In-Depth Information
2.5.1
Motions in 3-Space
In this section we look at the mechanics of transforming objects in 3-space. This may
not seem as easy as it was in the plane, but if we break the general problem into a
sequence of simple primitive ones, then it will become easy again.
Rigid motions are composites of rotations and/or translations. Is is useful to have
some alternate characterizations of rotations. The first characterization comes from
the Principal Axis Theorem (Theorem 2.5.5), which says that every rotation is a rota-
tion about an axis. Before we can make use of this way of looking at a rotation we
must resolve an ambiguity that we alluded to in a comment immediately following
Theorem 2.5.5. Suppose that
v
is a direction vector for the axis. If we consider a plane
orthogonal to the axis of the rotation, the notion of counterclockwise for this plane,
which is what is normally used to define the positive direction for an angle, will
depend on whether we are looking down on this plane from a point on the axis in the
v
or -
v
direction. The only way that this ambiguity in the expression “a rotation about
a line through a given angle” can be avoided is by requiring the line to be oriented.
The axis-angle representation of a rotation:
Here we represent a rotation by a
triple (
p
,
u
,q), where the point
p
and
unit
(direction) vector
u
specify the axis and q
is the angle of rotation determined according to the following rule:
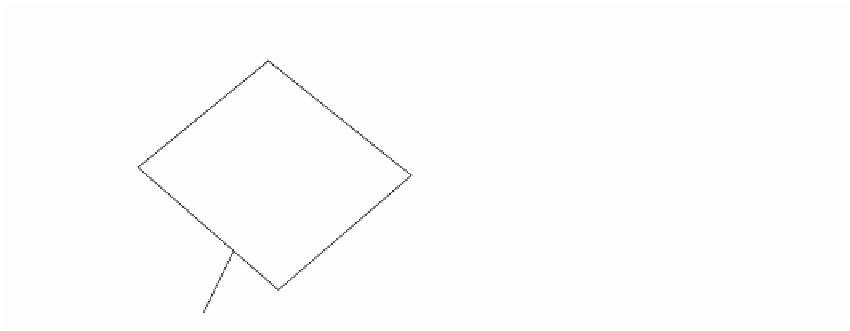
The rotation orientation rule:
Think of
u
as being the z-axis for a coordinate
system at
p
. Stand at
p
+
u
and look towards the “origin”
p
. The counterclockwise
direction in the “x-y plane” of this coordinate system will then determine the positive
direction for an angle. See Figure 2.27. More precisely, choose vectors
u
1
and
u
2
so
that (
u
1
,
u
2
,
u
) forms an orthonormal basis for
R
3
that induces the standard orienta-
tion. Then (
u
1
,
u
2
) induces the desired orientation on the x-y plane of the coordinate
system from which “clockwise” and “counterclockwise” are determined. The rule can
also be expressed in terms of the so-called “right-hand rule,” that is, if one lets the
thumb of one's right hand point in the direction of
u
, then the curl of the fingers will
specify the positive direction of angles. See Figure 2.27 again.
L
view
direction
u
u
2
u
1
p
Figure 2.27.
The orientation of a rotation angle using the right-hand rule.