Graphics Reference
In-Depth Information
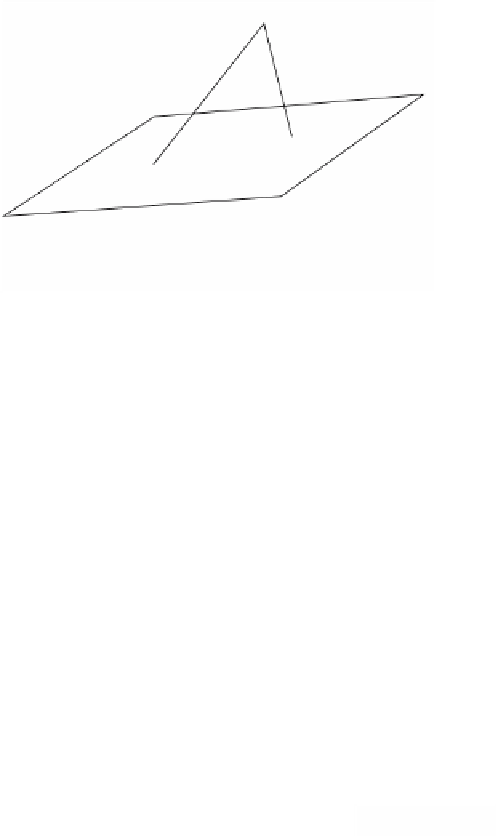
Figure 2.25.
Defining a reflection in
higher dimensions.
P
N
X
Q
A
P¢
vector for
X
. If
P
is any point in
R
n
, then S(
P
) =
P
+ 2
PQ
, where
PQ
is the orthogo-
nal projection of
PA
on
N
. See Figure 2.25.
2.5.2. Theorem.
Let S be a reflection about a hyperplane
X
.
(1) The definition of S depends only on the hyperplane and not on the point
A
and normal vector
N
that are chosen for it in the definition.
(2) If t is chosen so that
P
+ t
N
is the point where the line through
P
with direc-
tion vector
N
meets the plane
X
, then S(
P
) =
P
+ 2t
N
.
(3) The fixed points of S are just the points of
X
.
(4) If
L
¢ is a line orthogonal to
X
, then S(
L
¢) =
L
¢.
(5) Reflections about hyperplanes are motions.
Proof.
The details of the proof are left as an exercise for the reader because it is
essentially the same as the proof of Theorem 2.2.3.1. That proof did not really use the
fact that vectors were two-dimensional.
2.5.3. Example.
To find the reflection S about the plane
X
defined by the equation
xyz
--=
22 .
Solution.
Let
A
be any point in
X
. Since
N
= (1,-2,-2) is a normal vector for
X
, if
P
is any point, then it is easy to show that the orthogonal projection of
PA
on
N
is just t
N
, where t is chosen so that
P
+ t
N
lies in
X
. Let
P
= (x,y,z).
Solving
(
)
--
(
)
--
(
)
=
xt
+
22223
y t
z t
for t, gives
t = (1/9)(-x + 2y + 2z + 3).
Since S(
P
) =
P
+ 2t
N
, it follows that S has equations