Graphics Reference
In-Depth Information
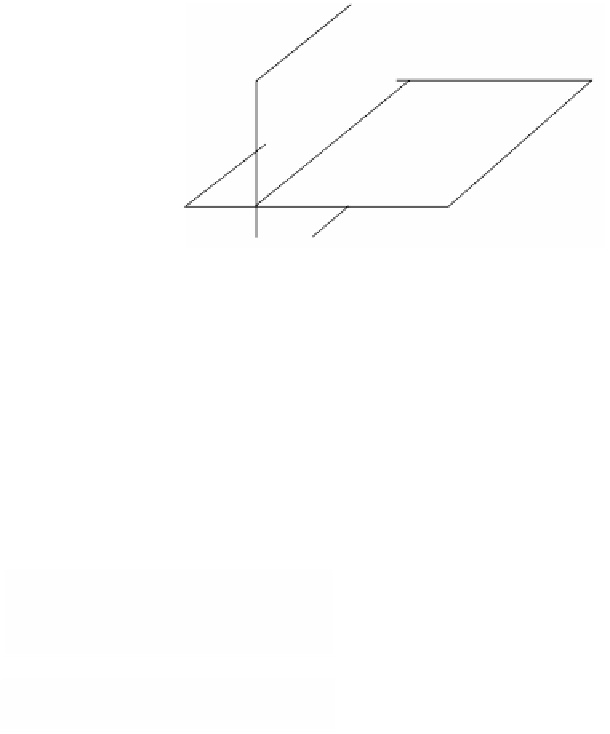
Figure 2.24.
Affine maps as composites
of parallel projections.
X
C
1
R
2
B
A¢
C
C¢
B¢
A
2.5
Beyond the Plane
Up to now, although some things applied to
R
n
, most of the details were specifically
about transformations in the plane. The fact is that much of what we did generalizes
to higher dimensions.
We start with motions of
R
n
.
Every motion M :
R
n
Æ
R
n
2.5.1. Theorem.
can be expressed by equations of the
form
xaxax
¢=
+
+
...
...
+
axc
+
1
11
1
12
2
1
nn
1
xaxax
¢=
+
+
+
axc
+
2
21
1
22
2
2
nn
2
◊
◊
◊
◊
◊
◊
◊
◊
◊
◊
xaxax
¢=
+
2 2
...
+
+
axc
+
(2.29)
n
n
11
n
nn
n
n
where A
M
= (a
ij
) is an orthogonal matrix. Conversely, every such system of equations
defines a motion.
Proof.
The discussion in Section 2.2.8 on frames showed that the theorem is valid
for motions in the plane. For the general case, assume without loss of generality that
M(
0
) =
0
. The key facts are Theorem 2.2.4.1, which says that M is a linear trans-
formation (and hence is defined by a matrix), and Lemma 2.2.4.3, which says that
M(
u
)•M(
v
) =
u
•
v
, for all vectors
u
and
v
. The rest of the proof simply involves ana-
lyzing the conditions M(
e
i
)•M(
e
j
) =
e
i
•
e
j
=d
ij
and is left as an exercise (Exercise 2.5.1).
In studying motions in the plane we made use of some important special motions,
such as translations, rotations, and reflections. Translations already have a general
definition. The natural generalization of the definition of a reflection is to replace lines
by hyperplanes.
Definition.
Let
X
be a hyperplane in
R
n
. Define a map S :
R
n
Æ
R
n
, called the
reflec-
tion about the hyperplane
X
, as follows: Let
A
be a point in
X
and let
N
be a normal