Graphics Reference
In-Depth Information
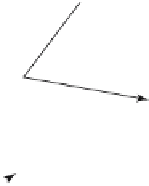
Figure 2.18.
Proving Theorem 2.4.5.
B¢
C
B
A¢
C¢
B
2
A
C
1
B
1
0
C
2
2.4.5. Theorem.
Any three noncollinear points in the plane can be mapped into any
other three noncollinear points by a unique transformation M with equations (2.25).
Proof.
Let (
A
,
B
,
C
) and (
A
¢,
B
¢,
C
¢) be two triples of noncollinear points. Let T
1
and T
2
be the translations that send
A
and
A
¢, respectively, to the origin
0
. Let T
1
(
A
,
B
,
C
) =
(
0
,
B
1
,
C
1
) and T
2
(
A
¢,
B
¢,
C
¢) = (
0
,
B
2
,
C
2
). See Figure 2.18. Since the vectors
B
1
and
C
1
and
the vectors
B
2
and
C
2
are bases for
R
2
, there is a linear transformation M
0
with
M
0
(
B
1
,
C
1
) = (
B
2
,
C
2
). The map M = T
-1
M
0
T
1
does what we want.
To prove the uniqueness of M, suppose there is another such map M¢, then
M
-1
M¢(
A
,
B
,
C
) = (
A
,
B
,
C
). As usual, it therefore suffices to show that any map T defined
by equations (2.25) that fixes three noncollinear points
A
,
B
, and
C
is the identity map.
There are many ways to prove this. For example, we may assume that
A
=
0
, so that
T is linear transformation. Then
B
and
C
are a basis for the plane and since T is
defined by what it does on a basis, it must be the identity everywhere.
We return to affine transformations.
2.4.6. Theorem.
An affine transformation of the plane that fixes three noncollinear
points is the identity map.
Sketch of proof.
Suppose that the affine transformation T fixes the noncollinear
points
A
,
B
, and
C
. The property of T we shall use over and over again is that if
P
and
Q
are distinct points, then T maps the line through
P
and
Q
into the line through T(
P
)
and T(
Q
). Let
L
B
be the line through
B
that is parallel to the line through
A
and
C
. Let
L
C
be the line through
C
that is parallel to the line through
A
and
B
. See
Figure 2.19. Then T(
L
B
) Õ
L
B
and T(
L
C
) Õ
L
C
because parallelism is preserved. It
follows that if
D
is the intersection of the lines
L
B
and
L
C
, then T(
D
) =
D
. Next, let
L
be the line through
D
that is parallel to the line through
B
and
C
and let
E
be the
intersection of
L
and the line through
A
and
B
. Clearly,
E
=
A
+ 2
AB
. By an argument
similar to the one that showed that T fixes
D
, we must have T(
E
) =
E
. It is easy to
continue this type of argument to show that T fixes all points in the form
A
+ m
AB
+
n
AC
, m, n Œ
Z
. From here it is only a small step to show that T fixes all points in the