Graphics Reference
In-Depth Information
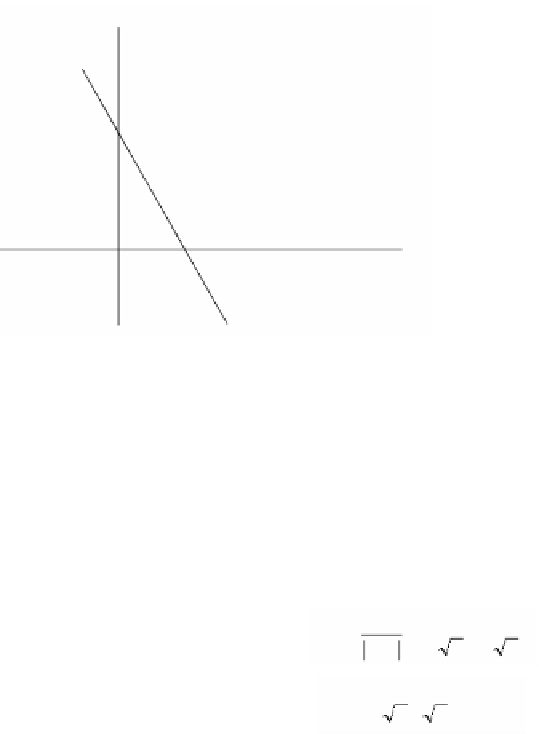
Figure 2.14.
Using frames to move lines.
y
y - 2x + 6 = 0
y + 2x - 3 = 0
L
2
w
2
L
1
C(0,3)
w
1
B(4,2)
D(1,1)
u
1
u
2
x
A(3,0)
Example 2.2.8.3 easily generalizes to finding a motion that maps the x-axis and
the origin to any other line and point. By taking the inverse of this map we can map
an arbitrary line to the x-axis. We can go a step further:
2.2.8.4. Example.
Again consider Figure 2.14. We find a motion M that sends the
point
A
= (3,0) to the point
C
= (0,3) and the directed line
L
1
to the directed line
L
2
.
Solution.
Following the approach used in Example 2.2.8.3 we can map the x-axis to
the line
L
2
using the map G, where G is the frame (
w
1
,
w
2
,
C
) and
CD
CD
1
5
2
5
Ê
Ë
ˆ
¯
w
=
=
,
-
,
1
2
5
1
5
=
Ê
Ë
ˆ
¯
w
2
,
.
If F is the frame defined in Example 2.2.8.3, then M = GF
-1
is a rigid motion that will
do what we want. In terms of equations we have
1
5
2
5
F
-1
:
(
)
+
x
¢=
x
-
3
y
2
5
1
5
(
)
+
y
¢=-
x
-
3
y
,
1
5
2
5
G:
x
¢=
x
+
y
2
5
1
5
y
¢=-
x
+
y
+
3,
and
3
5
4
5
9
5
M:
x
¢=-
x
+
y
+
4
5
3
5
27
5
y
¢=-
x
-
y
+
.