Global Positioning System Reference
In-Depth Information
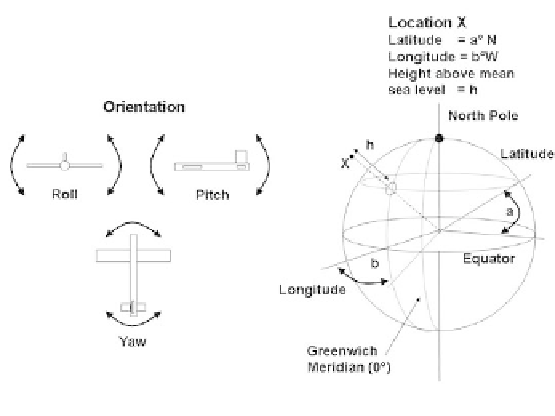
We usually have some sort of reference frame, usually the center of the Earth,
and thus can describe position with six parameters: three for location (latitude,
longitude, and height above sea level) and three for orientation (yaw, pitch, and
roll). In Figure 1.1, the position of a flying aircraft is fully specified. Although the
location has an absolute reference frame, the orientation is likely to be within a
relative reference frame, derived perhaps from the direction of travel (which
would be relative to the absolute location reference frame). Location is, however,
sometimes relative; for example, when specifying the position of one object with
respect to another.
Figure 1.1
The three dimensions of location and three dimensions of orientation.
Maps usually use a grid system with Cartesian coordinates specified by
“eastings” and “northings,” rather than the polar coordinates of latitude, longitude,
and height (usually above sea level). Simple algorithms can be used to convert
between the different systems [5].
1.4.4
Remote and Autonomous Positioning
Most positioning systems can be categorized according to where the processing of
the sensed information takes place. It can done locally inside the mobile
equipment of the user, remotely at a fixed radio base station, or remotely at a
computer center. Each approach has it merits. A remote system can minimize the
investments in user equipment, but it places the onus of processing and detection
centrally. As user numbers grow, the system does not scale well, since at some
point it is likely that more central equipment investments and radio channels
would be needed. In contrast, an autonomous system such as GPS scales very well
(as far as the infrastructure is concerned). Once the satellite and ground station