Global Positioning System Reference
In-Depth Information
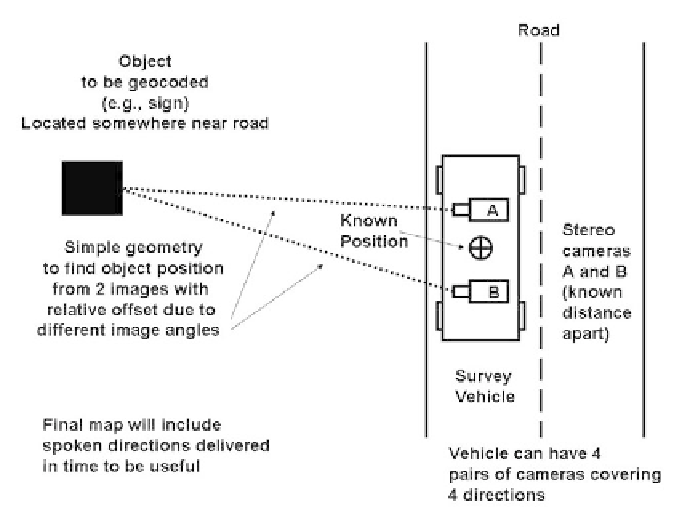
Figure 8.1
Finding the position of roadside objects using stereo cameras.
Organizations such as Navteq and Teleatlas buy licenses for the raw road
vector data from national agencies and then add extra layers of information for use
by drivers. These include attributes such as turn-by-turn instructions and point-of-
interest information. Camera vans are used to make video surveys (using
stereoscopic ranging) so that exact GPS locations of the van can be used to find
the location of extra attributes that can be seen in the distance away from the road
(see Figure 8.1). Manual attribution is often necessary and is a time-consuming
process often completed where labor is cheap. This is a good example of
positioning by inside-out scene analysis.
Rob van Essen [15] describes maps evolving from mathematical line graphs
to virtual reality models and [16] describes the Tele Atlas mobile van technology
with six cameras (two forward-looking stereo cameras for geometrically accurate
measurements from captured images and a sub-0.5m positional accuracy with
pictures of 1300 × 1300 pixels resolution). They are also experimenting with 3D
using a gyro for capturing road gradients and laser scanners for transverse slopes
(i.e., banks) and street layouts and with other combinations of sensors to provide
additional information using sensor fusion (as described in Chapter 7).