Environmental Engineering Reference
In-Depth Information
energy minimization (CEM) (Resmini
et al
., 1997). However,
partial unmixing can only be applied for a limited number of
materials of interest. Thus, these techniques are not suitable for
comprehensive urban material mapping.
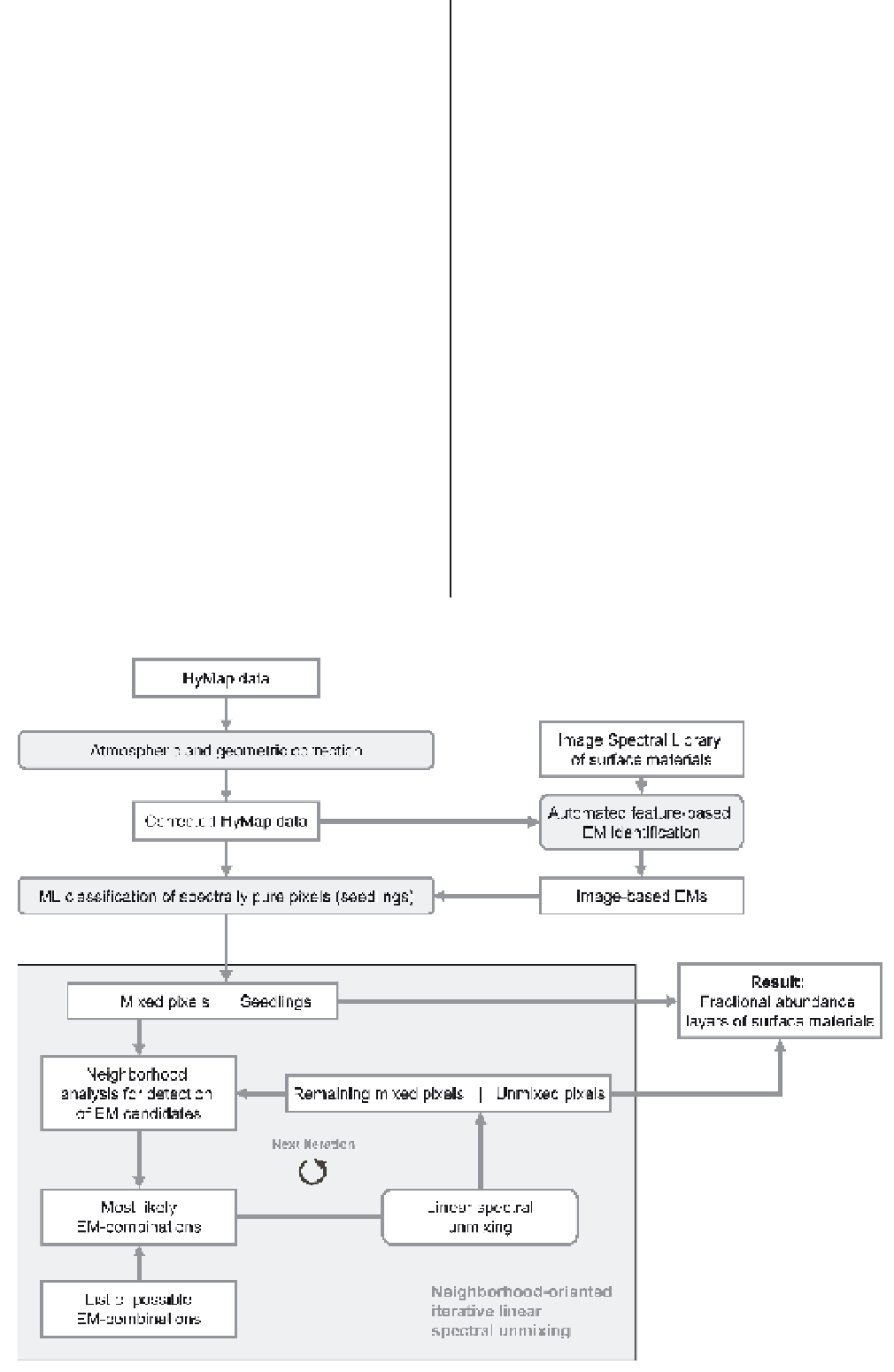
neighborhood-oriented iterative linear spectral unmixing (Roess-
ner
et al
., 2001; Segl
et al
., 2003). The approach also includes
the possibility of integrating additional object height informa-
tion at all processing steps reducing confusion between materials
(Sections 4.3.2.1 and 4.3.2.2). A more detailed overview of the
processing steps and their relation to each other is given in the
flowchart depicted in Fig. 4.3.
4.3.2
Processing system for
automatedmaterial mapping
4.3.2.1
Feature-based identification
of endmembers
A complex processing system optimized for automated iden-
tification of urban surface materials has been developed at the
Remote Sensing Section of the GFZ Potsdam, Germany. Standard
hyperspectral image analysis techniques discussed in Section 4.3.1
have been combined, modified and extended in order to meet
the special needs of hyperspectral material mapping in the urban
environment described in Section 4.3. The resulting approach
(Fig. 4.3) has reached a high degree of automation and con-
sists of three major steps. First, endmember identification is
carried out in the hyperspectral image data using an automated
spectral-feature based approach. Second, spectrally pure pixels
are identified by a maximum likelihood classification whereas
the previously identified endmembers serve as training infor-
mation. Third, the remaining unclassified pixels are analyzed by
The developedmethod automatically extracts representative end-
members and their spectral variations from the image data. For
this purpose, the existing comprehensive urban image spectral
library (Section 4.2.2) has been used to build a classifier that - in
contrast to the methods discussed in Section 4.3.1.2 - enables
supervised endmember detection.
The developed classifier
is based on spectral
features
(Section 4.2.3) and consists of
n
2
pairwise maximum
likelihood classifiers (
n
total number of surface materials).
The feature space of each pairwise classifier is optimized
for each two-class problem using an automated feature
selection algorithm (sequential forward selection). This way,
a class-specific dimensionality reduction is achieved that is
=
FIGURE 4.3
Automated multi-step processing system for urban material mapping. ML
=
maximum likelihood, EM
=
endmember.










Search WWH ::

Custom Search