Geoscience Reference
In-Depth Information
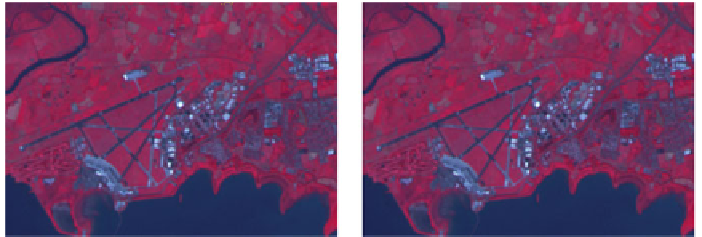
(a)
(b)
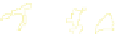
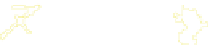
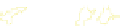
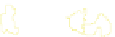
Fig. 13.8
Comparison of segmentation algorithms over Shannon airport.
a
Mean shift segmenta-
tion.
b
Edison segmentation
13.4 Edge Detection
In some cases it is necessary to run a filter on an image to help identify edges between
features located within images. For instance, it may be useful in order to identify
the edge between two land cover types or where the edge of lake meets land. For
these types of applications, OTB provides the
otbcli_EdgeDetection
module
which takes a single band image (or one band from a multispectral image) and uses
a filter to output the edge detected dataset as a raster image.
-progress
<
boolean
>
Report progress
-in
<
string
>
Input Image (mandatory)
-channel
<
int
32
>
Selected Channel (mandatory, default value is 1)
-ram
<
>
int
32
Available RAM (Mb) (optional, on by default, default value is 128)
-filter
<
string
>
Edge feature [gradient/sobel/touzi] (mandatory, default value is
gradient)
-filter.touzi.xradius
<
The X Radius (mandatory, default value is 1)
-filter.touzi.yradius
<
int
32
>
int
32
>
The Y Radius (mandatory, default value is 1)
-out
<
[pixel] FeatureOutput Image [pixel=uint8/uint16/int16/uint32/int32/
float/double] (default value is float) (mandatory)
string
>









































































































































































































































































































































































































































































































































































































































































































































































































































































Search WWH ::

Custom Search