Information Technology Reference
In-Depth Information
6 Priority Mapping of Scalable Layers
We considered two different mappings of the temporal and FGS layers of SVC
into the scalable layers
μ
i
. Let us assume that the number of temporal layers
is
T
. For a GOP size of 8, as used here, we have
T
= 4. For the first mapping,
which we call the Temporal-SNR mapping, the first
L
1layers(
μ
1
,...,μ
L−
1
)
are the base layers (FGS0) of the frames associated with the lowest to the highest
temporal level in decreasing order of importance for video reconstruction. So,
L
−
1=
T
and the number of scalable layers is
L
=
T
+1. The FGS layer of all the
frames in a GOP are defined as a single layer
μ
L
of even lesser importance. The
Temporal-SNR distortion estimation method uses exactly the same priorities as
the Temporal-SNR mapping, so we used it for our experimental results for this
mapping. The second mapping is the SNR-temporal mapping. For this mapping,
there are two layers, base and enhancement for each of the
T
temporal layers. In
this case, the FGS layer of the lower temporal layer has more importance than
the base layer of the higher temporal levels. Thus, there are a total of
L
=2
T
scalable layers. For the SNR-Temporal mapping, we used the SNR-Temporal
distortion estimation method, as it uses exactly the same priorities.
−
Fm
46.5
SNR−TEMP
TEMP−SNR
46
45.5
45
44.5
44
43.5
43
42.5
42
41.5
8
9
10
11
12
13
14
15
16
17
18
SNR
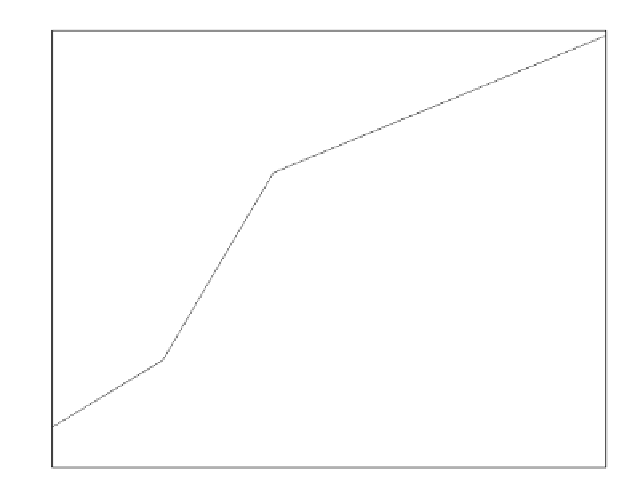
Fig. 2.
Performance of the cross-layer optimization using the Temporal-SNR and the
SNR-Temporal mappings of scalable layers (“Foreman” sequence)
7 Experimental Results
For experimental results, the “Foreman” and 'Akiyo” video sequences are en-
coded at 30 fps, GOP=8 and constant Intra-update (I) at every 32 frames. We






















































































Search WWH ::

Custom Search