Information Technology Reference
In-Depth Information
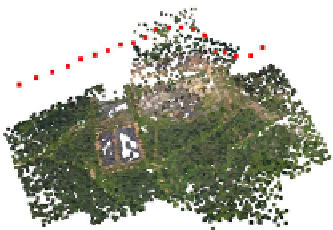
(a)
(b)
(c)
(d)
Fig. 2.
Combining overlapping scenes with
S
=20and
O
= 10, where the input was a
set of 10 megapixel aerial images taken from a plane at an altitude of 150m. (a) Scene
reconstructed from images 1 to 20. (b) Scene reconstructed from images 11 to 30.
(c) Combination without coordinate transformation. (d) Combination after coordinate
transformation. The red squares are the reconstructed positions of the cameras (i.e.
the plane's position at each time), and the other dots are reconstructed points of the
landscape.
eachother, also known as the gauge problem [15], and so does not create a global
coordinate system. To combine two or more sets of 3D points in different coordi-
nate systems, we have to know points that are present in both scenes, and based
on this correspondence find the coordinate transformation. The more points we
know, i.e. the larger the overlap, the closer this computed transformation will
be to the actual transformation.
3.2
Combining Two Overlapping Scenes
Combining two overlapping scenes consists of three steps.
1. Locate the points that are visible in both scenes. Obviously the 3D location of
the points is not useable for this purpose, as that depends on the coordinate
system of the scene. Instead we find matches based on the indices of the
feature points. Every view of a 3D point in a certain camera is associated
with a feature point
x
ij
(see section 2). All feature points in a certain camera
are indexed. A point
p
of scene 1, visible in cameras
c
p
, matches a point
q




Search WWH ::

Custom Search