Information Technology Reference
In-Depth Information
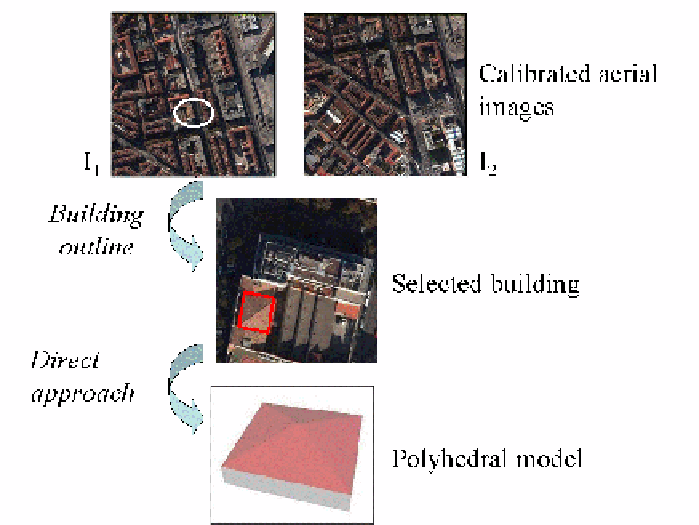
Fig. 3.
Extracting 3D polyhedral models from image rawbrightness
eight parameters: four parameters for the 2D location of the inner vertices
M
and
N
and four parameters for the height of the vertices
A
,
M
,
N
,and
C
.The
remaining vertices are determined by intersecting the corresponding line of sight
with the estimated support planes. The eight parameters are encapsulated into
one single vector
w
:
w
=(
U
M
,V
M
,U
N
,V
N
,Z
A
,Z
M
,Z
N
,Z
C
)
T
(1)
where (
U
M
,V
M
)and(
U
N
,V
N
) are the image coordinates of the vertices
M
and
N
, respectively. Recall that the 3D coordinates are expressed in a local
coordinate system whose
Z
axis coincides with the ground normal since the
aerial images are geo-referenced. In practice, although the 2D location of the
inner vertices is not known, the 2D line (the projection of a ridge segment)
going through them can be easily extracted from the master image by using a
simple edge detector followed by a Hough transform. Once the equation of this
2D line is known, the parametrization of the building model can be simplified
to:
w
=(
λ
M
,λ
N
,Z
A
,Z
M
,Z
N
,Z
C
)
T
(2)
where
λ
M
and
λ
N
parameterize the 2D location of the inner vertices along the
2D segment obtained by intersecting the 2D line with the building footprint.
Thus, finding the model boils down to finding the vector
w
.
Search WWH ::

Custom Search