Information Technology Reference
In-Depth Information
estimates as lane markers may not actually exist. Separate Kalman filters are
evaluated at every interval rather than collectively in one matrix to avoid the
unsolvable condition where the prediction counter exceeds 50 and the Kalman
filters have been deactivated at certain intervals .
6 Outlier Elimination
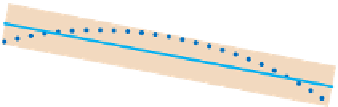
The estimates produced by the Kalman filter undergo Random Sample Consen-
sus (RANSAC) to eliminate outliers as shown in Fig. 7a. Normally, k-RANSAC
or quadratic RANSAC would be used in outlier elimination for fitting a curve
[15]; however, they are computationally intensive and slow. Luckily, since the
minimum radius of curvature recommended by AASHTO [14] is large, inlier
estimation using a straight line model in RANSAC with an appropriate error
threshold is sucient. This threshold is calculated using simple properties of a
circle.
30ft
0ft
r = 65ft
(a)
Fitting a line through the inliers.
(b)
Estimating a curve with straight line
and threshold.
Fig. 7.
RANSAC for inlier estimation
If lane markers lie on a curve with radius 65ft [14], this curve can be viewed as
an arc of a circle with the same radius as represented by the dotted blue line in
Fig. 7b. A circular segment can be created by joining the end points of this arc.
1
2
of the height of the circular segment is the minimum error threshold allowing
the ideal line model in RANSAC to contain all the points along the curve. The
ideal line is shown in cyan and the threshold (
δ
)isgivenby
r
2
(
r−
√
r
2
−d
2
)
2
+
d
2
4
r
−
−
δ
=
(6)
2
Finally, Ordinary Least Squares (OLS) estimation is used to fit a quadratic curve
on the remaining inliers. Each dot in the dotted blue line in Fig. 7b is an estimate
produced by the Kalman filter at one foot intervals within the 0-30ft range.
7 Error Estimation
First, the ground truth is generated using the
Time-Slice
approach which al-
lows to quickly and accurately annotate videos [16]. The error in each frame
































Search WWH ::

Custom Search