Geography Reference
In-Depth Information
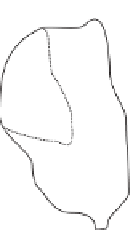
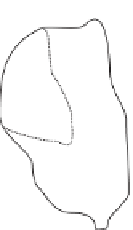
Figure 10.14. Schematic of runoff
routing processes represented by
top-kriging. Hydrographs for
locations A, B and C are shown.
From
Skøien and Blöschl (2007)
.
Advection
Hydrodynamic
dispersion
Geomorphologic
dispersion
C
A
A
A
B
B
B
C
A
A
A
B
B
B
time
time
time
average of the measurements in the neighbourhood. The
weights can be found from the expected correlations of the
variable at the observation and prediction locations. Geo-
statistical methods provide estimates of the uncertainty and
allow for measurement errors (De Marsily,
1986
, p. 300;
Merz and Blöschl,
2005
). While traditional geostatistical
methods such as ordinary kriging are not suitable for
stream networks, the top-kriging approach of Skøien
et al.(
2006
) does account for the stream network structure.
Based on their concepts, Skøien and Blöschl (
2007
) pro-
posed a new method, termed spatio-temporal top-kriging,
which estimates runoff time series at all locations of a river
network. The main idea of the approach is to conceptualise
catchments as space-time filters and to exploit the space-
time correlations of runoff along the stream network top-
ology. The spatio-temporal top-kriging method represents
two main groups of processes that control runoff. The first
group consists of variables that are continuous in space and
includes precipitation, evaporation and soil characteristics.
In top-kriging their variability is represented by the point
variogram that is based on Euclidian distances. The second
group of processes is related to routing on the hillslope and
in the stream network. Their effect cannot be represented
by Euclidian distances. Top-kriging represents these pro-
cesses in three ways. (i) The channel network structure and
the similarity between upstream and downstream neigh-
bours are represented by the catchment area that drains to a
particular location on the stream network. The catchment
areas are defined by their boundaries in space. (ii) Advec-
tive runoff routing (
Figure 10.14
left) is represented by a
simple routing model that takes into account the travel time
between upstream and downstream neighbours. (iii) Dis-
persive routing is represented by the space-time filter
(
Skøien and Blöschl, 2006a
). Dispersive effects include
hillslope routing as well as hydrodynamic and geomorpho-
logical dispersion (
Figure 10.14
centre and right). Hydro-
dynamic dispersion is caused by different travel times in
the stream within individual reaches, while geomorpho-
logical dispersion is related to the different lengths and
junctions of the stream network and results in a superpos-
ition of runoff from the tributaries.
Using this method, Skøien and Blöschl (
2007
) estimated
runoff time series with hourly resolution at many locations
of the stream network in Austria. An example for daily
runoff is shown in
Figure 10.15
for two points in time.
Note that top-kriging captures the routing of high runoff
depths (
15 mm/d) in small catchments on 26 March
down the stream network on 27 March. Cross-validation
tests showed that for their catchments the median Nash
>
-
Sutcliffe efficiency (NSE) was 0.87, as compared to 0.67
for estimates of a deterministic runoff model that used
regionalised model parameters. The much better perform-
ance of top-kriging is because it avoids precipitation data
errors and avoids the parameter identifiability issues of
traditional runoff models. The analyses indicate that the
kriging variance can be used as an estimate of the predict-
ive uncertainty for identifying catchments with potentially
poor estimates.
10.4 Process-based methods of predicting runoff
hydrographs in ungauged basins
Process-based methods are rainfall
runoff models that esti-
mate the runoff hydrograph from precipitation and
other climate variables. The main challenge in ungauged
catchments is the lack of local runoff data that could be
used for model selection and calibration. There is a wide
-



















Search WWH ::

Custom Search