Database Reference
In-Depth Information
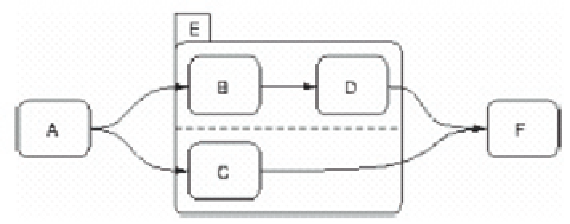
Figure 4: Parallel routing
the transition will take place may depend solely on the condition of the transition (Harel &
Politi, 1998). Hence, transitions do not have to depend on any particular events and actions
do not have to be performed during transitions. In Figure 4, E is an
and-state
, which has two
orthogonal components. Being in E means being in these two components simultaneously.
The
fork construct
specifi es that when the system exits state A, it will enter states B and C
fork construct
simultaneously. The
merge construct
specifi es that the system will leave state E only if it
merge construct
resides in states D and C simultaneously. However, because of the default conditions, this
transition will only take place if activities D and C are both completed. Thus, synchronization
occurs at merge constructs. Fork and merge constructs can be used to model the and-split
and and-join defi ned by WfMC (Workfl ow Management Coalition, 1999).
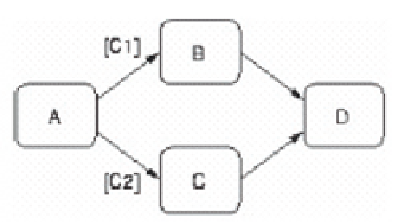
Conditional Routing
The system will choose one activity among several target activities to execute in
conditional routing. The decision depends on the truth or the falsity of the conditions of the
transitions. In Figure 5, C1 and C2 are two mutually exclusive conditions and the system can
only enter either state B or state C but not both. Conditions in statecharts can be used to model
the or-split and or-join defi ned by WfMC (Workfl ow Management Coalition, 1999).
Figure 5: Conditional routing