Geology Reference
In-Depth Information
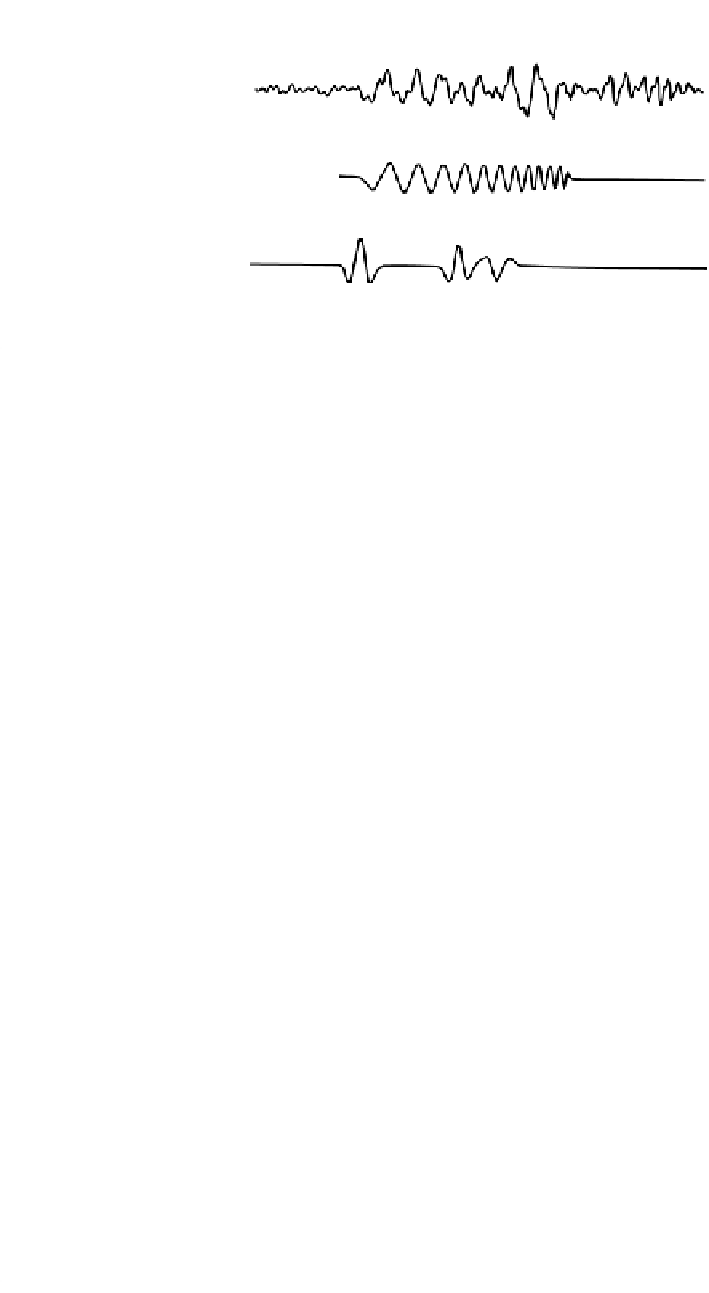
Waveform
Signal function
Cross-correlation
function
S
1
S
2
S
3
Fig. 2.14
Cross-correlation to detect
occurrences of a known signal concealed
in noise. (After Sheriff 1973.)
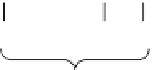
Signal positions
in waveform
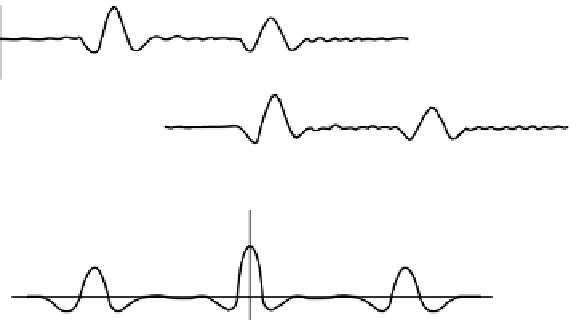
(a)
τ
Fig. 2.15
Autocorrelation of the
waveform exhibiting periodicity shown
in (a) produces the autocorrelation
function with side lobes shown in (b).The
spacing of the side lobes defines the
repetition period of the original
waveform.
φ
xx
(
τ
)
(b)
τ
random, and usually due to effects unconnected with
the geophysical survey. Coherent noise is, on the other
hand, components of the waveform which are generated
by the geophysical experiment, but are of no direct
interest for the geological interpretation. For example,
in a seismic survey the signal might be the seismic pulse
arriving at a detector after being reflected by a geological
boundary at depth. Random noise would be back-
ground vibration due to wind, rain or distant traffic.
Coherent noise would be the surface waves generated
by the seismic source, which also travel to the detector
and may obscure the desired signal.
In favourable circumstances the signal-to-noise ratio
(SNR) is high, so that the signal is readily identified and
extracted for subsequent analysis. Often the SNR is low
and special processing is necessary to enhance the infor-
mation content of the waveforms. Different approaches
are needed to remove the effect of different types of
noise. Random noise can often be suppressed by re-
peated measurement and averaging. Coherent noise
may be filtered out by identifying the particular charac-
teristics of that noise and designing a special filter to re-
move it.The remaining signal itself may be distorted due
to the effects of the recording system, and again, if the
nature of the recording system is accurately known, suit-
able filtering can be designed. Digital filtering is widely
employed in geophysical data processing to improve
SNR or otherwise improve the signal characteristics. A
very wide range of digital filters is in routine use in geo-
physical, and especially seismic, data processing (Robin-
son & Treitel 2000). The two main types of digital filter
are frequency filters and inverse (deconvolution) filters.
2.5.1 Frequency filters
Frequency filters discriminate against selected frequency
components of an input waveform and may be low-pass
(LP), high-pass (HP), band-pass (BP) or band-reject