Geology Reference
In-Depth Information
(b)
t
(a)
S
1
/D
3
S
2
D
2
D
4
D
1
x
S
1
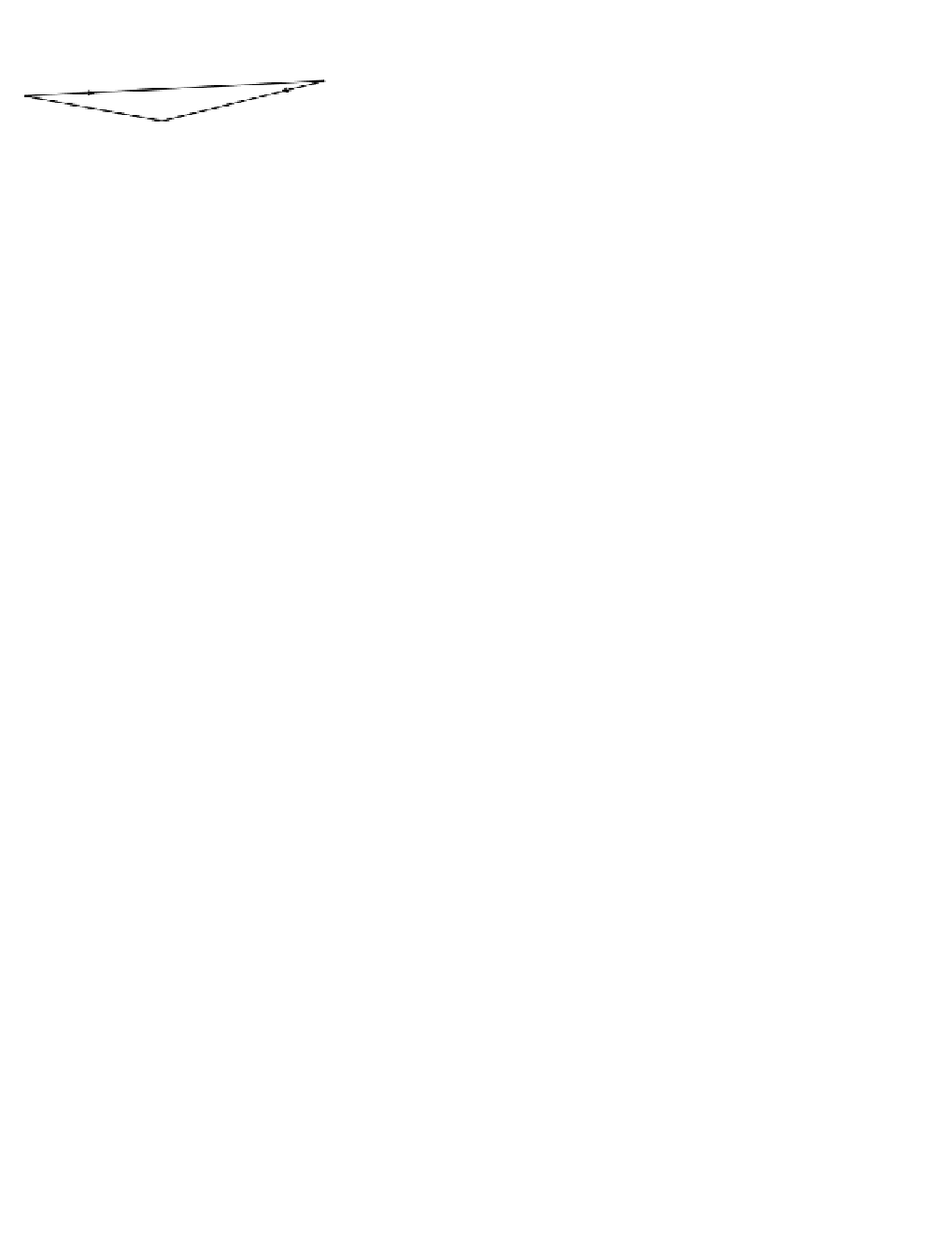
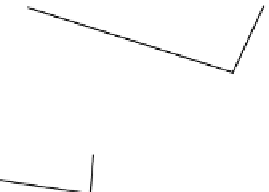
Fig. 5.22
(a) An example of the type of network of shots and detectors from which the travel times of refracted arrivals can be used in a
time term analysis of the underlying refractor geometry. (b) The plot of travel time as a function of distance identifies the set of refracted
arrivals that may be used in the analysis.
t
=
xv
+
+
+
dde
ij
ij
ti
tj
ij
5.10 Seismic tomography
where
t
ij
is the travel time of head waves from the
i
th site
to the
j
th site,
x
ij
is the offset distance between site
i
and
site
j
,
d
ti
and
d
tj
are the delay times (time terms),
v
is the re-
fractor velocity (assumed constant), and
e
ij
Although fan-shooting involves surface shots and
recorders, the method may be regarded as the historical
precursor of an important group of modern exploration
methods using shots and detectors located in boreholes.
In these methods, known as
seismic tomography
, subsur-
face zones are systematically investigated by transmitting
very large numbers of seismic rays through them. An ex-
ample is cross-hole seismics (see e.g.Wong
et al.
1987), in
which shots generated at several depths down a borehole
are recorded by detector arrays in an adjacent borehole
to study variations in the seismic wave transmission
through the intervening section of ground. A simple
example is shown in Fig. 5.23, where only a limited
subset of ray paths are shown.
The volume of ground under investigation is modelled
as divided into cubic elements. The seismic sources and
receivers are arranged so that multiple seismic rays pass
through each element of that volume. If the geological
unit under investigation is a near-horizontal bed, then the
sources, receivers and volume elements lie in a single hor-
izontal plane and the geometry is directly comparable to
the cross-borehole situation. An example of this geome-
try is the investigation of coal seams prior to long-wall
mining techniques. Here the sources and receivers are
arranged in the tunnels driven to give access to the seam.
It is theoretically straightforward to develop the
method to investigate 3D velocity structures. This is
done for medical imaging such as CAT scanning, where
X-rays are directed though the investigated volume by
moving the source and receiver freely around the
is an error
term associated with the measurement of
t
ij
.
If there are
n
sites there can be up to
n
(
n
- 1) observa-
tional linear equations of the above type, representing
the situation of a shot and detector at each site and all sites
sufficiently far apart for the observation of head waves
from the underlying refractor. In practice there will be
fewer observational equations than this because, nor-
mally, only a few of the sites are shot points and head
wave arrivals are not recognized along every shot-
detector path (Fig. 5.22(b)). There are (
n
+ 1) un-
knowns, namely the individual delay times at the
n
sites
and the refractor velocity
v
.
If the number
m
of observational equations equals the
number of unknowns, the equations can be solved to de-
rive the unknown quantities, although it is necessary ei-
ther that at least one shot and detector position should
coincide or that the delay time should be known at one
site. In fact, with the time term approach to refraction
surveying it is normally arranged for
m
to well exceed
(
n
+ 1), and for several shot and detector positions to be
interchanged.The resulting overdetermined set of equa-
tions is solved by deriving values for the individual delay
times and refractor velocity that minimize the sum
of squares of the errors
e
ij
. Delay times can then be con-
verted into local refractor depths using the same proce-
dure as in the plus-minus method described earlier.