Graphics Programs Reference
In-Depth Information
0.2
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0
50
100
150
200
250
300
350
400
450
500
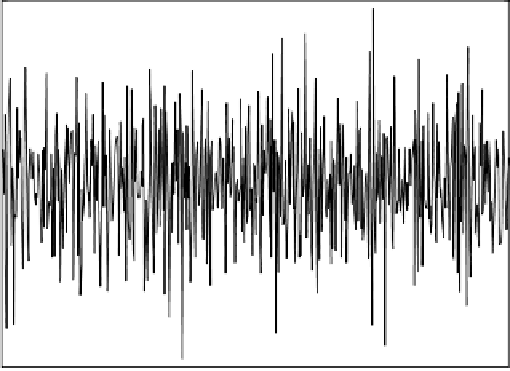
Sam ple num ber
Figure 9.27b. Position residual (error). Small gain coefficients. Noise present. The
error stays fairly large; however, its average is around zero. The
variation is due to noise.
9.9. The Kalman Filter
The Kalman filter is a linear estimator that minimizes the mean squared error
as long as the target dynamics are modeled accurately. All other recursive fil-
ters, such as the and the Benedict-Bordner filters, are special cases of the
general solution provided by the Kalman filter for the mean squared estimation
problem. Additionally, the Kalman filter has the following advantages:
αβγ
The gain coefficients are computed dynamically. This means that the same
filter can be used for a variety of maneuvering target environments.
1.
The Kalman filter gain computation adapts to varying detection histories,
including missed detections.
2.
The Kalman filter provides an accurate measure of the covariance matrix.
This allows for better implementation of the gating and association pro-
cesses.
3.
The Kalman filter makes it possible to partially compensate for the effects
of mis-correlation and mis-association.
4.
Many derivations of the Kalman filter exist in the literature; only results are
provided in this chapter.
Fig. 9.28
shows a block diagram for the Kalman filter.



















Search WWH ::

Custom Search