Graphics Programs Reference
In-Depth Information
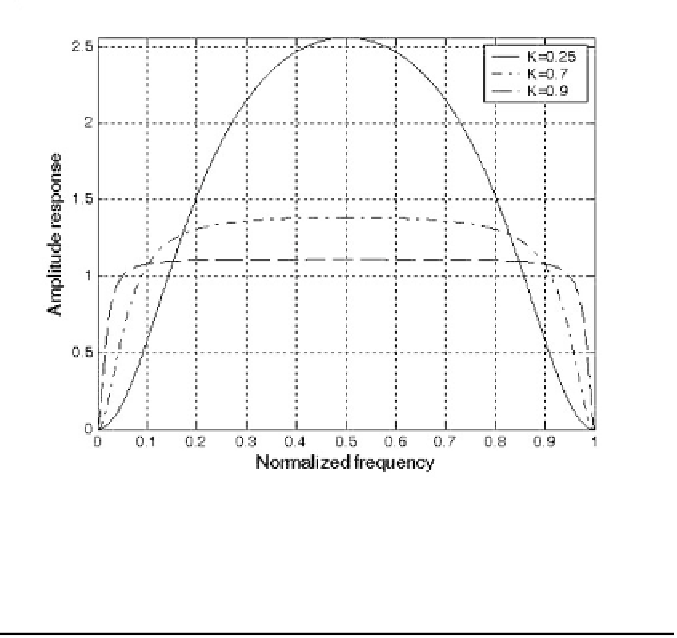
Figure 7.9. Frequency response corresponding to Eq. (7.24). This
plot can be reproduced using MATLAB program
Ðfig7_9.mÑ
given in Listing 7.3 in Section 7.11.
7.6. PRF Staggering
Target velocities that correspond to multiple integers of the PRF are referred
to as blind speeds. This terminology is used since an MTI filter response is
tations on the performance of MTI radars and their ability to perform adequate
target detection. Using PRF agility by changing the pulse repetition interval
between consecutive pulses can extend the first blind speed to tolerable values.
In order to show how PRF staggering can alleviate the problem of blind
speeds, let us first assume that two radars with distinct PRFs are utilized for
detection. Since blind speeds are proportional to the PRF, the blind speeds of
the two radars would be different. However, using two radars to alleviate the
problem of blind speeds is a very costly option. A more practical solution is to
use a single radar with two or more different PRFs.
For example, consider a radar system with two interpulse periods
T
1
and
T
2
, such that
Search WWH ::

Custom Search