Graphics Reference
In-Depth Information
Abb. 7.8
Verschiebung der Rotationsachse
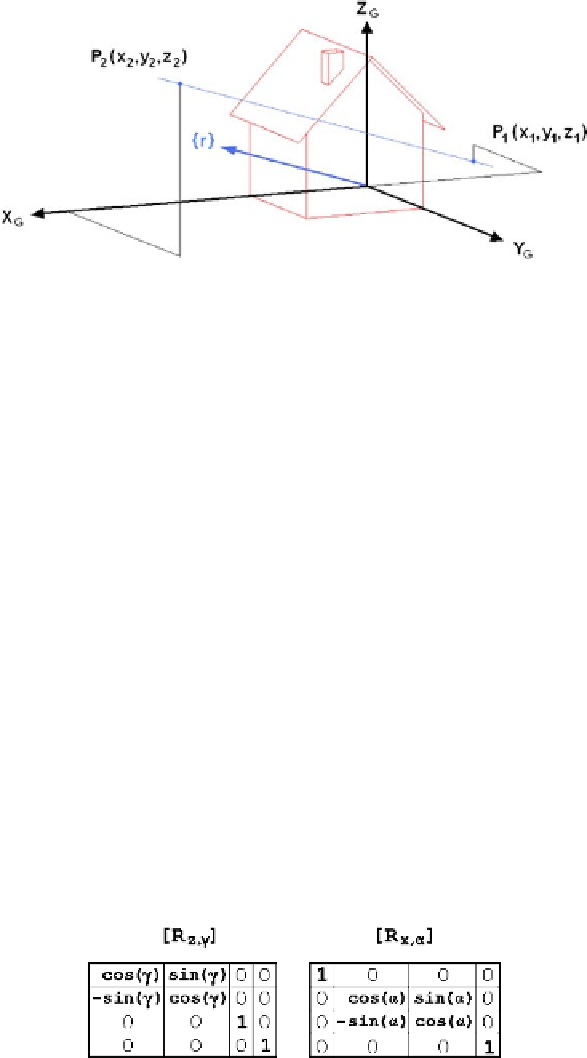
Abb. 7.9
Winkel für die Rotationen. Die Winkel
'
und
”
sind leicht ablesbar:
'
D arctan
.
r
y
=
r
z
/
;
”
D arctan
.
r
x
=
r
y
/
ImBild eingetragen ist der Richtungsvektor
{r}
mit seinen Komponenten
.
r
x
;
r
y
;
r
z
/
.
Die Projektionen des Richtungsvektors auf die drei Koordinatenebenen werden
nicht verwendet. Man kann damit zwar die Winkelfunktionen Sinus und Cosinus
unmittelbar ablesen und erspart sich den ArcTan()-, sowie den Sin()- und Cos()-
Aufruf, aber diese Vereinfachung ist wenig nachhaltig. Deshalb wird die durchgän-
gige Darstellung mit den Winkeln für alle Rotationen beibehalten (Abb.
7.9
).
Die Transformationsmatrizen
[R
z
;”
]
und
[R
x
;'
]
werden von Abschn.
7.2.5
über-
nommen. Im zweiten Schritt wird mit dem positiven Winkel
”
um die z-Achse
gedreht, damit der Richtungsvektor in der y-z-Ebene liegt. Im dritten Schritt erfolgt
schließlich die Drehung um die x-Achse, mit der die Rotationsachse in die globale
z-Achse gedreht wird.
Hier wäre auch eine Drehung mit einemWinkel
.90 '/
in die y-Achse möglich.
Nachdem die Rotationsachse nun in der globalen z-Achse liegt, kann im vierten