Graphics Reference
In-Depth Information
7.2.6 Drehung um eine beliebige Achse I
Für die Drehung um eine beliebige Rotationsachse sind drei Angaben erforderlich:
die Definition und Lage der Rotationsachse im Globalsystem sowie der Drehwin-
kel
•
, um den gedreht werden soll. Die Drehung wird in fünf hintereinander ge-
schaltete elementare Transformationen aufgelöst:
1. Verschieben von Rotationsachse und Objekt in den Ursprung;
2. Drehen um die z-Achse, damit die Rotationsachse in der y-z-Ebene liegt;
3. Drehen um die x-Achse, damit die Rotationsachse in die z-Achse fällt;
4. Drehen des Objekts um die z-Achse, die jetzt der Rotationsachse entspricht, mit
dem Winkel
®
;
5. Rücktransformation aller Drehungen (einschließlich des gedrehten Objekts) in
ihre ursprüngliche Lage durch Anwendung der inversen Transformationen.
Genau genommen geht es gar nicht darum, die Rotationsachse in eine der Koor-
dinatenachsen zu transformieren. Vielmehr wird das Globalsystem einschließlich
Objekt so gedreht werden, bis eine der Globalachsen mit der Rotationsachse zusam-
menfällt. Erst dann können die elementaren Rotationstransformationen verwendet
werden. Natürlich kann die Drehung über jede der drei Achsen des Globalsystems
aufgebaut werden.
In Abb.
7.8
läuft die Rotationsachse schräg durch das Haus und sei durch die
Punkte P
1
und P
2
gegeben. Der erste Schritt ist die Verschiebung der Rotationsach-
se
durch
den Ursprung. Dies wird erreicht, indem der Punkt P
1
in
den Ursprung
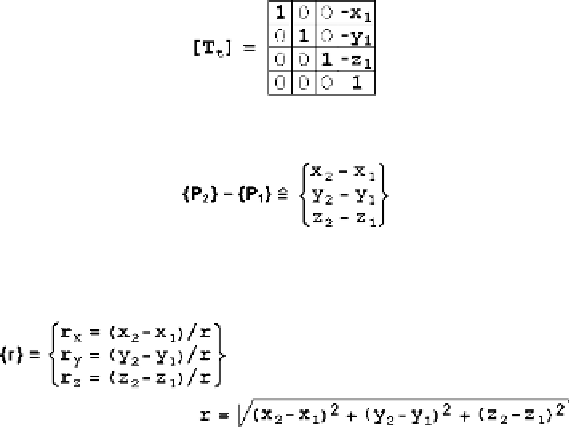
verschoben wird. Die hierzu erforderlichen Parameter lassen sich unmittelbar am
Bild ablesen. Die zugehörige Verschiebungsmatrix für den ersten Schritt sieht dann
folgendermaßen aus:
Die Gerade zwischen den Punkten P
1
und P
2
ist gegeben durch:
Nachdem die Rotationsachse in den Ursprung des Globalsystems verschoben ist,
wird diese Gerade zu einem Einheitsvektor normiert: