Graphics Reference
In-Depth Information
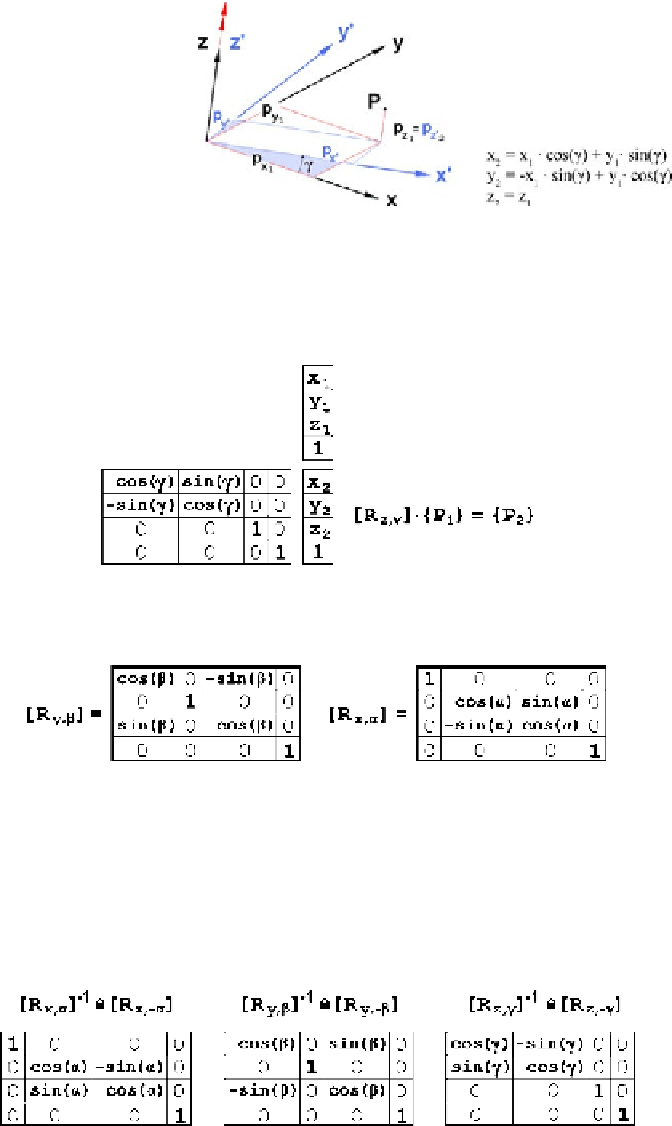
Abb. 7.7
Drehung um Cz
mit Winkel
”
Matriziell berechnen sich die Koordinaten des Punktes P
2
.
xyz
;
w
/
mittels einer
Multiplikation der Transformationsmatrix
[R
z
]
mit den Koordinaten des Punktes
P
1
(xyz,w); das Ergebnis stellt sich dann wie folgt dar:
Die Transformationsmatrizen für Drehungen um die x- bzw. y-Achse entwickeln
sich ganz analog, wobei für die Winkel jetzt
'
und
“
verwendet wurde:
Diese Rotationsmatrizen werden auch Eulersche Rotationsmatrizen genannt. Die
hierzu Inverse
[..]
1
muss nicht zwangsläufig durch Inversion der Matrix ermit-
telt werden. Einerseits ist diese wegen ihres speziellen Aufbaus (siehe Kap.
11.2.8
)
identisch mit ihrer Transponierten
[R]
1
t
, andrerseits ist unter „invers“ auch
die gegenteilige Transformation zu verstehen. Eine Drehung z. B. um die x-Achse
mit dem Winkel
D Œ
R
'
erfolgt mit der Matrix
[R
x
;'
]
. Die inverse bzw. gegenteilige
Transformation hierzu ist die Drehung mit dem Winkel
'
.