Graphics Reference
In-Depth Information
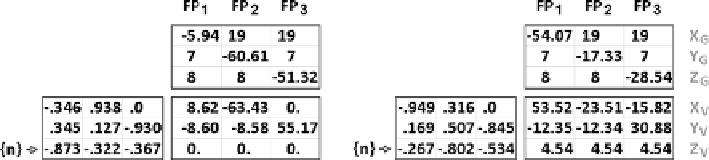
Tab. 8 . 2
Koordinaten für
f
g
g
.1;0;0/
!
k
D
1
n
x
Achse
X
Y
Z
x
0
D
b
x
C d
=
n
x
b
x
b
x
y
0
D
b
y
b
y
C d
=
n
y
b
y
z
0
D
b
z
b
z
b
z
C d
=
n
z
werden. Somit verbleibt für x
0
und die beiden anderen Komponenten analog
x
0
D
b
x
C
d
g
x
=
k
y
0
D
b
y
C
d
g
y
=
k
z
0
D
b
z
C
d
g
z
=
k
Der Punkt P
0
, für den diese Koordinaten gelten, liegt auf der Geraden
f
g
g
, die durch
das Projektionszentrum verläuft.
Neben der allgemeinen Geraden
f
g
g
mit ihrem Fluchtpunkt haben die Achsen
des Koordinatensystems ebenfalls Fluchtpunkte, die als Hauptfluchtpunkte bezeich-
net werden. Für die X-Achse beispielsweise erhält man mit
f
g
g.1;0;0/ !
k
D 1
n
x
die in Tab.
8.2
zusammengestellten Koordinaten.
Wenn eine Komponente n
k
des Normalenvektors den Wert null hat, gibt es folg-
lich keinen Hauptfluchtpunkt in der zugehörigen Richtung; siehe die Abbildung
eingangs dieses Kapitels mit
f
n
g.
n
x
;
n
y
;0/
.AusTab.
8.2
wird ferner deutlich, dass
die Hauptfluchtpunkte von drei Parametern abhängig sind:
der Orientierung
f
n
g
der Projektionsebene im Globalsystem, (die man in einer
speziellen Aufgabenstellung als konstant ansehen kann);
dem Standort des Beobachters mit seinem Ortsvektor
f
b
g
und
seinem Abstand
d
zur Projektionsebene.
Mit diesem Ergebnis werden die Hauptfluchtpunkte FP
k
sowohl im Global- als auch
im Projektionssystem für die beiden in Abschn.
8.3.4
durchgerechneten Beispiele
angegeben. Die Transformationsmatrizen
[T
GV
]
wurden bereits dort verwendet. Im
Projektionssystem ergeben auch die
Z
V
-Koordinaten der Fluchtpunkte wieder den
Abstand der Projektionsfläche zum Ursprung.
Beispiel:
„Sonderfall“
allgemein