Graphics Reference
In-Depth Information
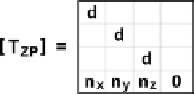
rechte) Abstand vom Beobachter zur Ebene aus zwei Anteilen zusammensetzt:
d
D
n
x
.
r
x
b
x
/ C
n
y
.
r
y
b
y
/ C
n
z
.
r
z
b
z
/
D .
n
x
r
x
C
n
y
r
y
C
n
z
r
z
/ .
n
x
b
x
C
n
y
b
y
C
n
z
b
z
/
D
e
r
e
b
mit
Abstand:
e
r
D
n
x
r
x
C
n
y
r
y
C
n
z
r
z
D .
n
/ f
r
g
- Referenzpunkt
e
b
D
n
x
b
x
C
n
y
b
y
C
n
z
b
z
D .
n
/ f
b
g
- Beobachter
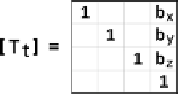
Mit diesen Daten erfolgt die Transformation der Szenerie mit anschließender
Rückverschiebung
in die ursprüngliche Position mittels der inversen Translati-
onsmatrix
Œ
T
t
]
1
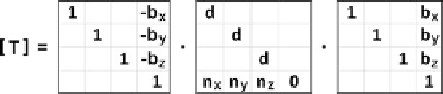
Die gesamte Transformation setzt sich damit aus diesen drei Matrizen zusam-
men, auf deren Ausmultiplikation wird zunächst jedoch verzichtet:
[T
t
]
Œ
T
ZP
]
Œ
T
t
]
1
[T]
D
Überhaupt ist die Bildung von
[T]
nicht sinnvoll. Wegen ihres besonderen Auf-
baues ist jede der drei Matrizenmultiplikationen effektiver hinzuschreiben und
schneller in der Ausführung, als zuerst die Gesamtmatrix zu bilden und mit die-
ser vollbesetzten Matrix die Multiplikation durchzuführen.
Wir projizieren wieder unseren Quader mit folgenden Projektionsdaten:
B
.19; 7; 8/
Projektionszentrum
D
View-Position, Ortsvektor
f
b
g
R
.0;0;0/
Referenzpunkt im Ursprung und
f
n
g.19; 7; 8/
Normalenvektor der Projektionsebene
.0:873; 0:322; 0:367/
Hiermit ergibt sich die gleiche Projektion wie sie im Abschn.
8.3.1
als „senkrechte
Zentralprojektion“ auf anderem Wege durchgeführt wurde.