Graphics Reference
In-Depth Information
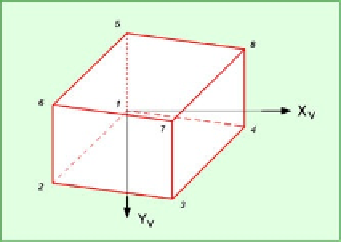
Abb. 8.17
Quader für die Projektionsrichtung Global -> View
Eine x-beliebige Drehung ist mit einer der Transformations-Matrizen
[R]
aus
Abschn.
7.2
zu erreichen.
Bleibt noch der Zusammenhang herzustellen mit der hier verwendeten Transfor-
mationsmatrix. Das Projektionssystem hat die Achsen
(XYZ)
V
,sieheAbb.
8.17
,
wobei die Achse
Z
V
senkrecht auf der Projektionsebene steht und in diese hinein-
zeigt. Das Objekt ist nun um die globalen Achsen so zu drehen, dass die Projek-
tionsrichtung parallel zur Achse
Z
V
verläuft; in diesem Beispiel sogar mit dieser
zusammenfällt.
Prinzipiell kann die Gesamtdrehung über jede der Globalachsen aufgebaut wer-
den. Hier erfolgt in zwei Schritten:
eine negative Drehung um
Y
G
mit
“ D
arctan
.8=
p
.19
// D21;56
ı
,
2
C 7
2
eine positive Drehung um
Z
G
mit
” D
arctan
.7=19/ D 20;22
ı
.
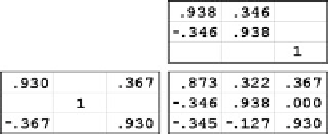
Beide Drehungen hintereinander geschaltet liefert eine Transformationsmatrix für
eine globale Drehung (Nullwerte in den Matrizen sind weggelassen):
[T
G
]
D
[R
“
]
Œ
R
C
”
]
Mit dieser Transformationsmatrix werden lediglich die gedrehten Koordinaten im
Globalsystem ermittelt. Würde man beide Matrizen vertauschen, ergibt sich ein an-
deres Matrizenprodukt. Dies ist leicht einzusehen, basiert doch die 2. Drehung auf
einer anderen Ausgangslage der Achsen aus der 1. Drehung.