Hardware Reference
In-Depth Information
scheduling
activation
termination
READY
RUN
preemption
signal
wait on
free resource
busy resource
WAITING
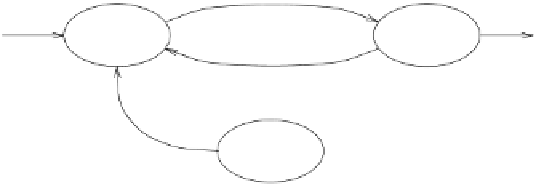
Figure 2.13
Waiting state caused by resource constraints.
A task waiting for an exclusive resource is said to be
blocked
on that resource. All
tasks blocked on the same resource are kept in a queue associated with the semaphore
protecting the resource. When a running task executes a
wait
primitive on a locked
semaphore, it enters a
waiting
state, until another task executes a
signal
primitive that
unlocks the semaphore. Note that when a task leaves the waiting state, it does not
go in the running state, but in the ready state, so that the CPU can be assigned to the
highest-priority task by the scheduling algorithm. The state transition diagram relative
to the situation described above is shown in Figure 2.13.
2.3
DEFINITION OF SCHEDULING PROBLEMS
In general, to define a scheduling problem we need to specify three sets: a set of
n
tasks Γ=
{
τ
1
,τ
2
,...,τ
n
}
, a set of
m
processors
P
=
{
P
1
,P
2
,...,P
m
}
and a set of
s
types of resources
R
=
. Moreover, precedence relations among
tasks can be specified through a directed acyclic graph, and timing constraints can
be associated with each task. In this context, scheduling means assigning processors
from
P
and resources from
R
to tasks from Γ in order to complete all tasks under the
specified constraints [B
+
93]. This problem, in its general form, has been shown to be
NP-complete [GJ79] and hence computationally intractable.
{
R
1
,R
2
,...,R
s
}
Indeed, the complexity of scheduling algorithms is of high relevance in dynamic real-
time systems, where scheduling decisions must be taken on line during task execution.
A
polynomial algorithm
is one whose time complexity grows as a polynomial function
p
of the input length
n
of an instance. The complexity of such algorithms is denoted by
O
(
p
(
n
)). Each algorithm whose complexity function cannot be bounded in that way
is called an
exponential time algorithm
. In particular,
NP
is the class of all decision
problems that can be solved in polynomial time by a
non
deterministic Turing machine.

Search WWH ::

Custom Search