Hardware Reference
In-Depth Information
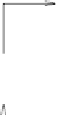
vision
display
cab
"path"
cab
"force"
force
control
camera
sensor
robot
monitor
Figure 11.11
Process structure for the surface exploration example.
/*-----------------------------------------------------------*/
/* Global constants */
/*-----------------------------------------------------------*/
#include "dick.h"
/* DICK header file
*/
#define TICK
1.0
/* system tick (1 ms)
*/
#define T1
20.0
/* period for force
(20 ms) */
#define T2
80.0
/* period for vision
(80 ms) */
#define T3
28.0
/* period for control (28 ms) */
#define T4
60.0
/* period for display (60 ms) */
#define WCET1
0.300
/* exec-time for force
(ms) */
#define WCET2
4.780
/* exec-time for vision
(ms) */
#define WCET3
1.183
/* exec-time for control (ms) */
#define WCET4
2.230
/* exec-time for display (ms) */













Search WWH ::

Custom Search