Hardware Reference
In-Depth Information
When the frequencies of hierarchical nested servo loops differ for about an order
of magnitude, the analysis of the stability and the design of the control laws are
significantly simplified.
For instance, if at the lowest level a joint position servo is carried out with a period of
1
ms
, a force control loop closed at the middle level can be performed with a period
of 10
ms
, while a vision process running at the higher control level can be executed
with a period of 100
ms
.
11.3
HIERARCHICAL DESIGN
In this section, we present a hierarchical design approach that can be used to develop
sophisticated control applications requiring sensory integration and multiple feedback
loops. Such a design approach has been actually adopted and experimented on sev-
eral robot control applications built on top of a hard real-time kernel [But91, BAF94,
But96].
output to
the user
high level goal
F3
SU
CU
3
3
S3
C3
F2
SU
CU
2
2
S2
C2
F1
SU
CU
1
1
S1
C1
SU = Sensing Unit
ROBOT
CU = Control Unit
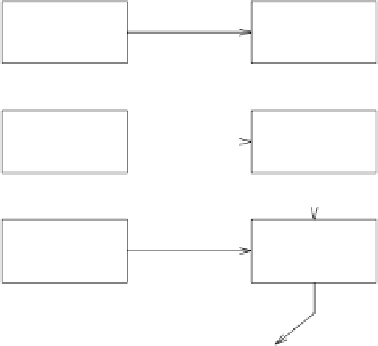
Figure 11.9
Example of a hierarchical control system.







Search WWH ::

Custom Search