Hardware Reference
In-Depth Information
11.1
INTRODUCTION
All complex control applications that require the support of a computing system can
be characterized by the following components:
1. The
system
to be controlled. It can be a plant, a car, a robot, or any physical
device that has to exhibit a desired behavior.
2. The
controller
. For our purposes, it will be a computing system that has to pro-
vide proper inputs to the controlled system based on a desired control objective.
3. The
environment
. It is the external world in which the controlled system has to
operate.
The interactions between the controlled system and the environment are, in general,
bidirectional and occur by means of two peripheral subsystems (considered part of the
controlled system): an
actuation
subsystem, which modifies the environment through
a number of actuators (such as motors, pumps, engines, and so on), and a
sensory
subsystem, which acquires information from the environment through a number of
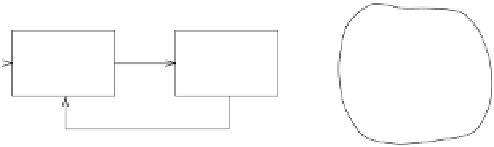
sensing devices (such as microphones, cameras, transducers, and so on). A block
diagram of the typical control system components is shown in Figure 11.1. Depending
Input
Controller
System
ENVIRONMENT
Figure 11.1
Block diagram of a generic control system.
on the interactions between the controlled system and the environment, three classes
of control systems can be distinguished:
1. Monitoring systems,
2. open-loop control systems, and
3. feedback control systems.



Search WWH ::

Custom Search