Hardware Reference
In-Depth Information
Another state, found in many operating systems, is the RECEIVE state, introduced by
the classical message passing mechanism. A job enters this state when it executes a
receive
primitive on an empty channel. The job exits this state when a
send
primitive
is executed by another job on the same channel.
In real-time systems that support dynamic creation and termination of hard periodic
tasks, a new state needs to be introduced for preserving the bandwidth assigned to the
guaranteed tasks. This problem arises when a periodic task
τ
k
is aborted (for example,
with a
kill
operation), and its utilization factor
U
k
cannot be immediately subtracted
from the total processor load, since the task could already have delayed the execution
of other tasks. In order to keep the guarantee test consistent, the utilization factor
U
k
can be subtracted only at the end of the current period of
τ
k
.
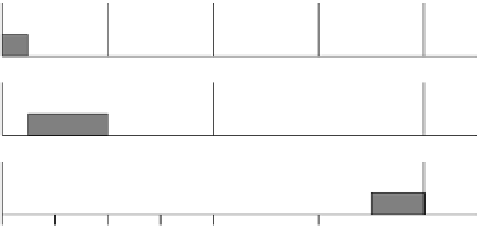
For example, consider the set of three periodic tasks illustrated in Figure 10.3, which
are scheduled by the Rate-Monotonic algorithm. Computation times are 1, 4, and 4,
and periods are 4, 8, and 16, respectively. Since periods are harmonic and the total
utilization factor is
U
=1, the task set is schedulable by RM (remember that
U
lub
=1
when periods are harmonic).
τ
1
τ
2
τ
3
0
2
4
6
8
10
12
14
16
Figure 10.3
Feasible schedule of three periodic tasks under RM.
Now suppose that task
τ
2
(with utilization factor
U
2
=0
.
5) is aborted at time
t
=4
and that, at the same time, a new task
τ
new
, having the same characteristics of
τ
2
,
is created. If the total load of the processor is decremented by 0
.
5 at time
t
=4,
task
τ
new
would be guaranteed, having the same utilization factor as
τ
2
. However, as
shown in Figure 10.4,
τ
3
would miss its deadline. This happens because the effects of
τ
2
execution on the schedule protract until the end of each period.
As a consequence, to keep the guarantee test consistent, the utilization factor of an
aborted task can be subtracted from the total load only at the end of the current period.
In the interval of time between the abort operation and the end of its period,
τ
2
is






Search WWH ::

Custom Search