Hardware Reference
In-Depth Information
To better understand the different limited preemptive approaches, the task set reported
in Table 8.1 will be used as a common example throughout this chapter.
C
i
T
i
D
i
τ
1
1
6
4
τ
2
3
10
8
τ
3
6
18
12
Table 8.1
Parameters of a sample task set with relative deadlines less than periods.
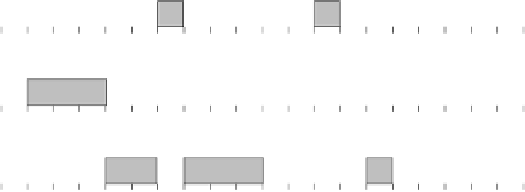
Figure 8.3 illustrates the schedule produced by Deadline Monotonic (in fully preemp-
tive mode) on the task set of Table 8.1. Notice that the task set is not schedulable,
since task
τ
3
misses its deadline.
1
τ
1
3
τ
2
deadline miss
6
τ
3
0
2
4
6
8
10
12
14
16
18
20
Figure 8.3
Schedule produced by Deadline Monotonic (in fully preemptive mode) on the
task set of Table 8.1.
8.1.1 TERMINOLOGY AND NOTATION
Throughout this chapter, a set of
n
periodic or sporadic real-time tasks will be consid-
ered to be scheduled on a single processor. Each task
τ
i
is characterized by a worst-
case execution time (WCET)
C
i
, a relative deadline
D
i
, and a period (or minimum
inter-arrival time)
T
i
. A constrained deadline model is adopted, so
D
i
is assumed to
be less than or equal to
T
i
. For scheduling purposes, each task is assigned a fixed
priority
P
i
, used to select the running task among those tasks ready to execute. A
higher value of
P
i
corresponds to a higher priority. Note that task activation times
are not known a priori and the actual execution time of a task can be less than or
equal to its worst-case value
C
i
.
Tasks are indexed by decreasing priority, that is,
∀
i
|
1
≤
i<n
:
P
i
>P
i
+1
. Additional terminology will be introduced below for
each specific method.






































Search WWH ::

Custom Search