Hardware Reference
In-Depth Information
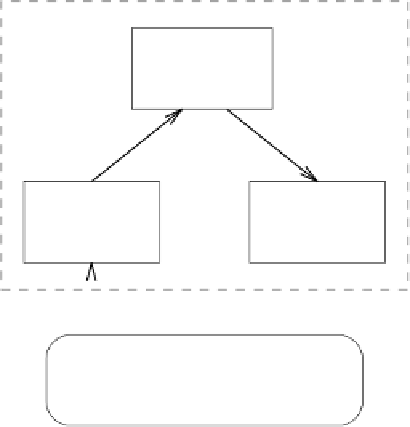
Control
System
Sensory
Actuation
System
System
ENVIRONMENT
Figure 1.2
Block diagram of a generic real-time control system.
In fact, whereas the objective of fast computing is to minimize the average response
time of a given set of tasks, the objective of real-time computing is to meet the indi-
vidual timing requirement of each task [Sta88].
However short the average response time can be, without a scientific methodology we
will never be able to guarantee the individual timing requirements of each task in all
possible circumstances. When several computational activities have different timing
constraints, average performance has little significance for the correct behavior of the
system. To better understand this issue, it is worth thinking about this little story:
2
There was a man who drowned crossing a stream with an average depth of
six inches.
Hence, rather than being fast, a real-time computing system should be predictable.
And one safe way to achieve predictability is to investigate and employ new method-
ologies at every stage of the development of an application, from design to testing.
At the process level, the main difference between a real-time and a non-real-time task
is that a real-time task is characterized by a
deadline
, which is the maximum time
within which it must complete its execution.
2
From John Stankovic's notes.




Search WWH ::

Custom Search