Hardware Reference
In-Depth Information
τ
1
τ
2
0
2
4
6
8
10
12
14
16
18
20
(a)
aperiodic requests
DS
time
overflow
τ
2
0
2
4
6
8
10
12
14
16
18
20
C
s
2
1
0
2
4
6
8
10
12
14
16
18
20
(b)
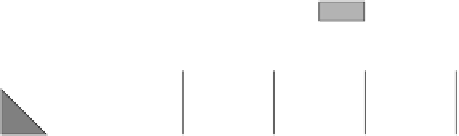
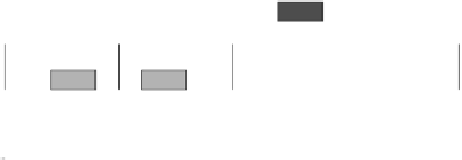
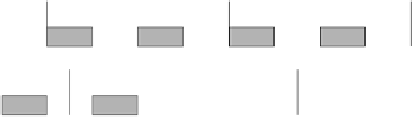
Figure 5.9
DS is not equivalent to a periodic task. In fact, the periodic set
{τ
1
,
τ
2
}
is
schedulable by RM (a); however, if we replace
τ
1
with DS,
τ
2
misses its deadline (b).
although it is the highest-priority task ready to run, but it
defers
its execution until time
t
=5, which is the arrival time of the first aperiodic request.
If a periodic task
defers
its execution when it could execute immediately, then a lower-
priority task could miss its deadline even if the task set was schedulable. Figure 5.9
illustrates this phenomenon by comparing the execution of a periodic task to the one
of a Deferrable Server with the same period and execution time.
The periodic task set considered in this example consists of two tasks,
τ
1
and
τ
2
,
having the same computation time (
C
1
=
C
2
=2) and different periods (
T
1
=4,
T
2
=5). As shown in Figure 5.9a, the two tasks are schedulable by RM. However,
if
τ
1
is replaced with a Deferrable Server having the same period and execution time,
the low-priority task
τ
2
can miss its deadline depending on the sequence of aperiodic
arrivals. Figure 5.9b shows a particular sequence of aperiodic requests that cause
τ
2
to miss its deadline at time
t
=15. This happens because, at time
t
=8,DS
does not execute (as a normal periodic task would do) but preserves its capacity for
future requests. This deferred execution, followed by the servicing of two consecutive



























Search WWH ::

Custom Search