Information Technology Reference
In-Depth Information
active polymers, series elastic actuators, or mechatronic joints, having one or more
electromagnetic motors properly controlled to mimic human muscle mechanical
features (i.e. stiffness, viscosity).
So far, artificial muscles
can match only certain temporal, spatial or force regimes
typical of biological muscle, but they cannot fully replicate all these capabilities
together. In particular, they cannot obtain at same time the same high-density energy
source and the adjustable mechanical impedance properties. The emerging roadmap,
establishing the main priorities in the short, middle and long terms, is: strengthening of
the current technologies and development of stable and reliable mechatronic systems
for AAL-based artificial actuators; definition of a new design paradigm leading to
emerging technologies for new bio-artificial muscles (2015);
implementation and
strengthening of new bio-artificial muscles (by 2020);
development of stable
mechatronic systems for AAL, based on new bio-artificial muscles (2025).
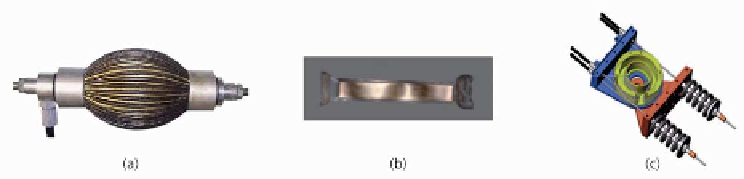
Figure 8.
Overview of the main technologies used in the current state of the art to implement a human
muscle-skeletal based actuator: a) McKibben artificial muscle, b) electroactive polymer and c) series-elastic
actuator (Venemam, 2005).
5.3.7.
Safe and highly back-drivable/under-actuated mechanisms
In advanced research for robotic hands, two main fields can be identified: manipulation
and grasping. Efforts have been made to design grasping hands that have mechanical
and control architectures which are simple enough to be made available widely on a
commercial basis, as for example prostheses for amputees or industrial grippers for
pick-and-place operations. Many researchers have therefore used under-actuation as a
strategy to reduce the number of actuators while preserving the capability of the hand
to adapt its shape to the grasped object. Surprisingly, very few under-actuated hands
have been successful as industrial grippers, probably because they can lead to
somewhat non-intuitive behaviour and produce non-stable grasps. Good examples of
such an approach are those of Barrett Hand, RTR II Hand, SARAH and MARS Hands.
On the form-closure capability and on the grasp stability (according to Lyapunov)
of robotic under-actuated hands, innovative models will be available. Under-actuated
robotic hands have been effective as industrial grippers because of simple control
architectures. Thanks to new implantable interfaces, robotic under-actuated hands have
been commercially successful as prostheses for amputees.
5.3.8.
Neuroscience-based models of limb motor control
Human motion control strategies
A thorough knowledge of the human motion control strategies is a crucial aspect in the
development of high-performance robotic systems for AAL. Ideally, the
implementation of motion-control strategies based on neuroscience models will enable
robotic systems to behave like humans. If we think of an active orthosis for limb