Agriculture Reference
In-Depth Information
100
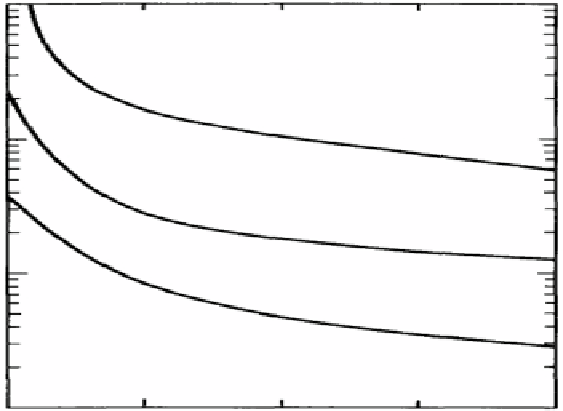
soil texture: loam
10
1
0.1
0.3
0
0.1
0.2
0.4
volumetric water content in cm
3
/ cm
3
Fig. 5.17
Depths of sensing by microwaves and soil moisture. The y axis has a logarithmic scale
(From Ulaby et al.
1996
, altered)
penetrate into soil. However, the depth depends on wavelength and on soil moisture
(Fig.
5.17
). The longer the waves and the lower the soil water content, the deeper
can be sensed.
Yet the farmer does not know exactly
a priori
about the soil moisture content, espe-
cially not on a site-specific basis. This is, what he wants to know. A general rule -
which disregards the actual water content and relies on average situations - is that the
depth of moisture sensing is one fifth of the wavelength (Paul and Speckmann
2004
).
Hence the depth of sensing
•
for a frequency of 30 GHz and a wavelength of 1 cm is only 0.2 cm
•
for a frequency of 10 GHz and a wavelength of 3 cm is about 0.6 cm
•
for a frequency of 1 GHz and a wavelength of 30 cm is about 6 cm
•
for a frequency of 0.5 GHz and a wavelength of 60 cm goes up to 12 cm.
The latter depth is about the maximum which can be achieved with present day
technology operating on a surface reflection mode. This maximum depth suffices
for controlling the sowing depth of crops on a site specific basis. It does not quite
suffice, if for irrigation purposes, information about the water available for a grow-
ing crop is needed. The roots of most crops take up water far beyond this maximum
depth. In short, regarding the depth of sensing there are limits for radar waves that
operate in the surface reflection mode.
However, there are additional limits for water sensing by active radar waves.
This method relies on reflection of radiation and this depends not only on the