Agriculture Reference
In-Depth Information
50
drying front
at 5.1 cm
40
drying front
at 2.5 cm
30
20
10
0.0
0.6
1.3
1.9
2.5
3.2
3.8
4.4
5.1
5.7
6.4
depth from soil surface in cm
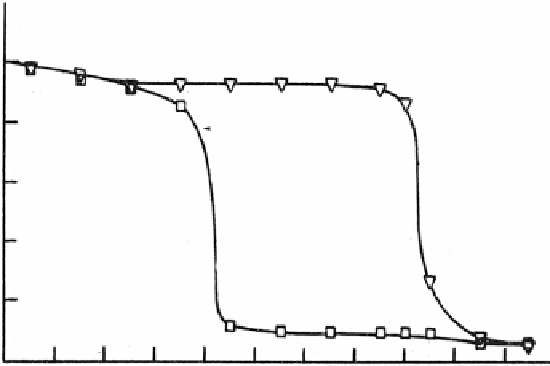
Fig. 8.10
Average voltages between two uninsulated electrodes that move horizontally in a sandy
loam. The depths of the electrodes were varied so that drying fronts of the soil were crossed
(From Bowers and Bowen
1975
)
Site-specific control for such seeding according to a moisture seeking program and
for a limited seeding depth is possible (Weatherly and Bowers
1997
). Locating the
drying front via electrical resistance or voltage can be realized with a high precision
(Bowers et al.
2006
; Carter and Chesson
1993
). An adaequate sensor control results in
deviations on either side of the drying front of not more than about 3 mm (Fig.
8.10
).
The air-dry soil is above the point, where the voltage decreases rapidly with depth.
This concept of seeding depth control via sensing of the drying front and adapting
the soil cover above the seeds seems to be a logical approach for regions with
continental climate. But commercial use of this concept up to now is lacking. The
same holds for comprehensive knowledge about scraping- and seeding depths that
should be searched for by the control system. It should be borne in mind that
contact
sensing
of resistance or voltage within a soil implies wear by abrasion, corrosion
and collisions with stones for the tool.
Non contact sensing
based on infrared radiation is less subjected to these wear
factors. However, it is not known whether this method of sensing the moisture of
successive soil layers allows for a similar precision.
8.4
Less Tillage, Crop Residues and Sowing Methods
There is a distinct conflict of objectives between precision of seed placement on the
one hand and less cultivation on the other hand. Improvements in the seed distribu-
tion over the area as well as a high emergence are more difficult to obtain, when as