Geoscience Reference
In-Depth Information
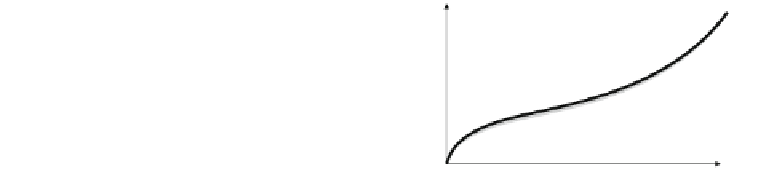
Fig. 5.6
Creep of ice under a
constant load. The primary,
secondary and tertiary regimes
are shown
Creep
2
1
Stress=constant
Time
I
II
III
Table 5.2
Creep regimes in viscous deformation of ice under constant load
Regime
Name
Viscous law
I
Primary creep
Sub-linear
II
Secondary creep
Linear
III
Tertiary creep
Super-linear
Law y(x)=cx
a
is sub-linear for a < 1, linear for a = 1, and super-linear for a >1
Modelling these creep regimes is discussed in Schulson and Duval (2009) for glacier
ice. The primary creep is modelled as (Glen 1955).
e
p
¼
e
0
þ b
t
3
p
þ e
min
t
ð
5
:
13
Þ
ʵ
0
is the instantaneous strain, and the transient strain
e
t
¼
b
t
3
p
is made of recov-
where
erable delayed elastic strain
ʵ
d
and irreversible viscous strain (see Schulson and Duval
2009). Delayed elastic strain can be an order of magnitude larger than immediate elastic
strain, while transient creep can be two orders of magnitude larger than the elastic strain.
The secondary creep is well described by the Glen
'
is (1955) law (see Paterson 1999)
e
¼ A
r
n
ð
5
:
14
Þ
where A and n are the
flow law parameters. Data for the stresses in the range 0.2
2 MPa
-
support the value
= 3, and for lower stresses the power is less than 3 (Schulson and
Duval 2009). The parameter
n
depends primarily on the temperature. In tertiary creep the
strain-rate increases from the minimum achieved in the secondary creep.
The Maxwell medium, where elastic and viscous models are connected in series, serves
as the basic model for ductile behaviour of ice. The viscous part is taken as a nonlinear
law, which is far preferable to the linear form. For a
A
fixed temperature the model can be
written in the form (see Glen 1955; Ramseier 1971; Ashton 1986)
n
e
¼
1
E
r
E
r þ
M
D
ð
5
:
15
Þ

















Search WWH ::

Custom Search