Biomedical Engineering Reference
In-Depth Information
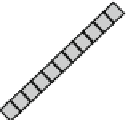
Fig. 11
Illustration of the
basic model used in iterative
methods of reconstruction.
The line of projection,
p
i
,is
originated by the sum of the
contributions of the pixels,
f
j
(voxels in 3D case) that are
crossed by the line. The
values
a
ij
represent the
fraction that the pixel
j
contributes to the line of
projection
i
p
i
a
ij
f
j
X
3. The errors are backprojected to the image space resulting in the set
"
i
;
4. Finally, the errors in the image space are used to update the image,
X
.n/
;
From the mathematical point of view, the reconstruction can be analyzed with
the help of Fig.
11
. Initially, a voxelized space is established (or pixelated, in the 2D
case) in which each projection line crosses certain voxels (or pixels). Therefore, each
measurement is originated by the weighted sum of the intensity values of the voxels
(pixels) that are over the line of projection and the noise associated to the process.
Thus, the projection,
p
i
,isdefinedby
X
p
i
D
a
ij
f
j
;
(12)
j
where
a
ij
represent the fraction that pixel
j
contributes to the line of projection
i
.
The backprojection, on the other hand, will be:
X
f
j
D
a
ij
p
i
;
(13)
i
The reconstruction can then be more generally presented as a matrix problem:
P
D AXC R;
(14)
where
P
represents the set of all projections,
p
i
, (measurements),
A
is the matrix of
elements
a
ij
, called the system matrix that links the projections with the unknown
values
X
,and
R
represents the noise.
If the noise was known and the matrix
A
invertible, the solution would be direct.
However, neither the noise is known nor the matrix is generally invertible, thus it is
usually necessary to employ other methods.