Graphics Programs Reference
In-Depth Information
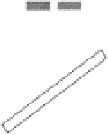
17.
φ
C
B
A
θ
The bar
ABC
is attached to the vertical rodwith a horizontal pin. The assembly
isfree to rotate about the axisoftherod. In the absence of friction, the equations
of motion of the systemare
2
sin
¨
˙
¨
2
˙
˙
θ
=
φ
θ
cos
θ
φ
=−
θ
φ
cot
θ
12 rad,
˙
If the systemis set into motionwith the initialconditions
θ
(0)
=
π/
θ
(0)
=
0 and
˙
0,
20 rad/s, obtain a numerical solutionwith the adaptive
Runge-Kuttamethod from
t
φ
(0)
=
φ
(0)
=
5 s and plot
˙
=
0to1
.
φ
vs.
t
.
18.
Solve the circuit problem in Example 7.11 if
R
=
0 and
0 when
t
<
0
E
(
t
)
=
9 sin
π
t
when
t
≥
0
=
19.
SolveProb. 21 in ProblemSet 1if
E
240 V (constant).
20.
R
1
L
i
2
i
1
E
(
t
)
R
2
C
i
1
i
2
L
Kirchoff'sequationsfor the circuit in the figure are
L
di
1
dt
+
R
1
i
1
+
R
2
(
i
1
−
i
2
)
=
E
(
t
)
L
di
2
q
2
C
=
dt
+
R
2
(
i
2
−
+
i
1
)
0
where
dq
2
dt
=
i
2
Using the data
R
1
=
4
,
R
2
=
10
,
L
=
0
.
032 H,
C
=
0
.
53 F and
20Vif0
<
t
<
0
.
005 s
E
(
t
)
=
0 otherwise
plot the transient loop currents
i
1
and
i
2
from
t
=
0to0
.
05 s.





Search WWH ::

Custom Search