Graphics Programs Reference
In-Depth Information
81 m/s
2
rep-
resents the gravitational acceleration. If the projectile istohit the target at the 45
◦
angle shown in the figure, determine
v
,
where
t
is the time measured from the instantoflaunch, and
g
=
9
.
θ
and the timeofflight.
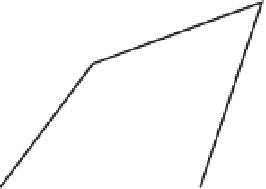
29.
y
2
200 mm
1
3
x
The three angles shown in the figure of the four-bar linkage are relatedby
150 cos
θ
1
+
180 cos
θ
2
−
200 cos
θ
3
=
200
150sin
θ
1
+
180sin
θ
2
−
200 sin
θ
3
=
0
75
◦
.
Determine
θ
1
and
θ
2
when
θ
3
=
Note that there aretwo solutions.
∗
4.7
Zeroes of Polynomials
Introduction
Apolynomialofdegree
n
has the form
a
1
x
n
a
2
x
n
−
1
P
n
(
x
)
=
+
+···+
a
n
x
+
a
n
+
1
(4.9)
where the coefficients
a
i
may be realor complex. We will concentrate onpolynomi-
als with real coefficients, but the algorithms presentedinthis article also work with
complex coefficients.
The polynomialequation
P
n
(
x
)
=
0hasexactly
n
roots, which may be realor
complex. If the coefficients are real, the complexroots always occur in conjugate pairs
(
x
r
+
where
x
r
and
x
i
are the real and imaginary parts, respectively. For
real coefficients, the number of real roots can be estimated from the
rule of Descartes
:
ix
i
,
x
r
−
ix
i
)
,
The number of positive, real roots equals the number of sign changes in the
expression for
P
n
(
x
), or less by an even number.
The number of negative, real roots isequal to the number of sign changes in
P
n
(
−
x
), or less by an even number.
=
x
3
−
2
x
2
−
+
.
As an example, consider
P
3
(
x
)
8
x
27
Since the sign changes
twice,
P
3
(
x
)
=
0haseither twoor zero positive real roots. On the other hand,
P
3
(
−
x
)
=−
x
3
−
2
x
2
+
8
x
+
27 contains a single sign change; hence
P
3
(
x
) possesses
one negative realzero.









Search WWH ::

Custom Search