Biomedical Engineering Reference
In-Depth Information
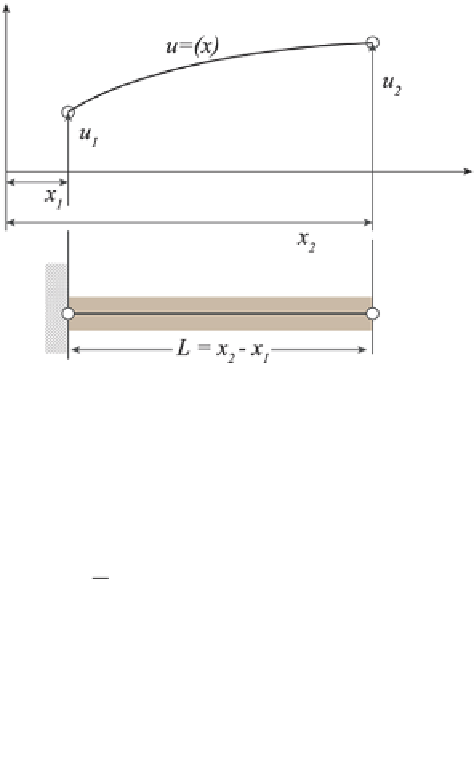
Fig. 5.36
A single 1D finite
bar element with forces
applied at the ends of the bar
(5.60)
ux NxuNxu
() ()
=
+
() [ {}
=
N
u
1
1
2
2
where [ ] is a row matrix and {} is a column matrix.
The shape functions for each node are
x x
−
xx
−
x
x
2
1
N
=
= −
1
N
=
=
(5.61)
1
2
xx
−
L
xx L
−
2
1
2
1
which provides a linear interpolation from node-1 to node-2, since it produces
N
1
=
for
x
=
x
1
, and
N
1
=
for
x
=
x
2
, and similarly for node-2.
The continuous displacement function represented by the discretisation becomes
x
L
x
L
+
ux
() [ {}
=
N
u
=
1
−
u
u
(5.62)
1
2
where [ ] is a row matrix of the interpolation functions, and {} is a column matrix
of the nodal displacements. We now determine the relation between the nodal dis-
placements and applied forces to obtain the stiffness matrix for the bar element. The
fundamental equation for deflection
δ
of an elastic bar having modulus of elastic-
ity
E
, length
L
and uniform cross-sectional area
A
when subjected to axial load
P
is
given by
δ=
PL
/
AE
and the equivalent spring constant is
P
AE
(5.63)
k
==
L
To compute the nodal displacements from some given loading condition on the ele-
ment we obtain the necessary equilibrium equations relating the displacements to
applied forces. Firstly the strain-displacement relation is


Search WWH ::

Custom Search