Biomedical Engineering Reference
In-Depth Information
START
Get the nondominated
solutions and update
the Pareto-optimal
solutions set if necessary
Set the required
parameters
Randomly generate the
initial routes of ants
and set
g
= 0
Update the
trail level by (2.13)
Get the new ant colony
using (2.12) based on
the attractiveness and
trail level
Yes
g
= MAXIMUM
ITERATION?
No
g
=
g
+ 1
Objective value
evaluation
Output Pareto-optimal
solutions
Rank assignment
based on
Pareto dominance
END
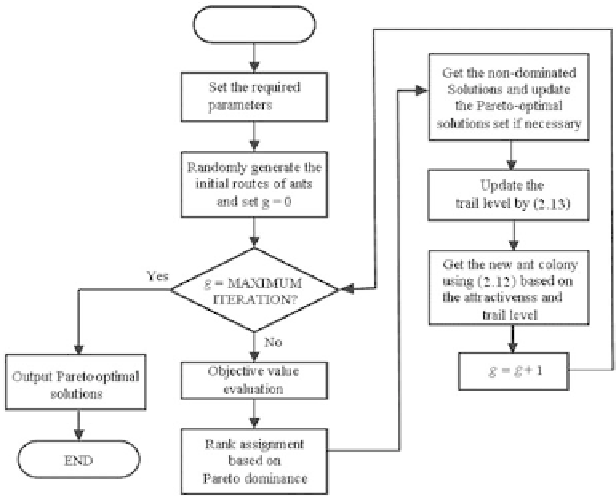
Figure 2.12
Flowchart.of.ACO.
and.
p
i
k
.is.given.by
α
β
τ
+ η
τ
ij
ij
if( )
ij
∉
tabu
∑
k
α
β
(
+ η
)
k
p
=
.
(2.12)
is
is
ij
s tabu
∉
k
0
otherwise
.
where.
tabu
k
. is. the. unreachable. move. of. agent.
k
. from. state.
i
;. α. and. β. rep-
resent. the. impacts. of. η
ij
. and. τ
ij
,. respectively,. which. are. user-deined;. and.
0 < α, β < 1.
When.all.the.ants.finish.their.moves,.the.trails'.levels.are.updated.by
τ
( )
g
= ρτ
(
g
−
1)
+ ∆τ .
(2.13)
ij
ij
ij
.
where.0 < ρ < 1.is.the.evaporation.coeficient.determined.by.the.programmer,.
∆τ
ij
. is. the. sum. of. the. contributions. of. all. ants. that. have. been. moved. from.
state.
i
.to.
j
,.which.is.computed.by
N
∑
k
∆τ
=
∆τ
.
(2.14)
ij
ij
.
k
=
1



Search WWH ::

Custom Search