Biomedical Engineering Reference
In-Depth Information
K
p
e
v
(
nT
)
Ω
18
Ω
12
Ω
11
Ω
17
R
Ω
4
Ω
3
Ω
13
Ω
10
Ω
5
Ω
2
K
i
e
p
(
nT
)
-R
R
Ω
6
Ω
1
Ω
14
Ω
9
Ω
7
Ω
8
-R
Ω
15
Ω
16
Ω
20
Ω
19
(a)
K
d
∆
y
(
nT
)
Ω
18
Ω
12
Ω
11
Ω
17
R
Ω
4
Ω
3
Ω
13
Ω
10
Ω
5
Ω
2
y
d
(
nT
)
-R
R
Ω
6
Ω
1
Ω
14
Ω
9
Ω
7
Ω
8
-R
Ω
19
Ω
15
Ω
16
Ω
20
(b)
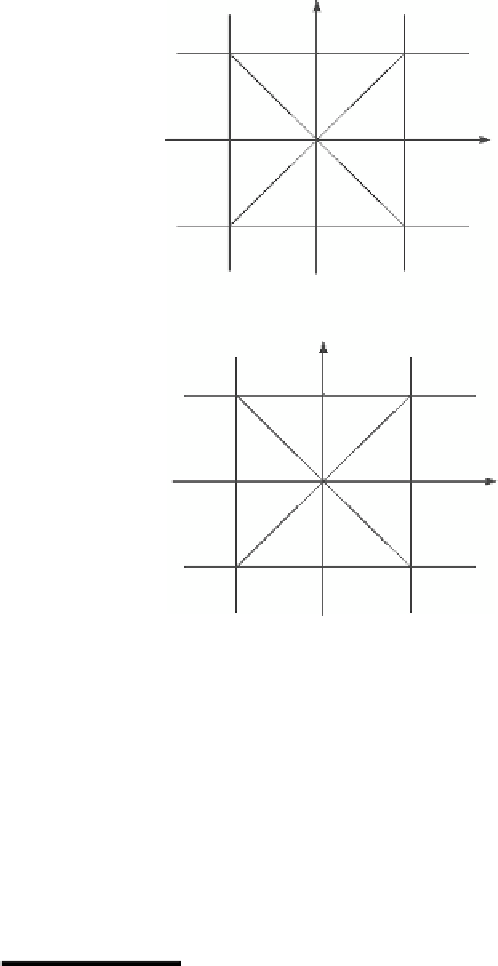
Figure D.3
(a).Region.for.ΔuPI.and.(b).region.for.ΔuD.of.fuzzy.PI.and.D.controllers.input-combination.val-
ues..(From.Tang,.K..S.,.Man,.K..F.,.Chen,.G.,.Kwong,.S.,.An.optimal.fuzzy.PID.controller,.
IEEE
TransactionsonIndustrialElectronics
,.48(4),.757-765,.2001.)
It.should.be.noted.that.a.single.constant.
R
.can.be.used.in.these.member-
ship. functions. since. the. inputs. and. outputs. will. be. weighted. by. the. gains.
,
K K K K
p
,
,
,
.and.
K
uD
.
i
d
uPI
References
.
1.. Carvajal,. J.,. Chen,. G.,. Ogmen,. H.,. Fuzzy. PID. controller:. Design,. performance.
evaluation,.and.stability.analysis,.
InformationSciences
,.123,.249-270,.2000.
.
2.. Chen,. G.,. Conventional. and. fuzzy. PID. controllers:.An. overview,.
International
JournalofIntelligentControlSystems
,.1,.235-246,.1996.
Search WWH ::

Custom Search