Biomedical Engineering Reference
In-Depth Information
y
d
, ∆
y
are negative
y
d
, ∆
y
are positive
1
0.5
y
d
,
∆
y
-R
0
R
(a)
Output negative
Output
zero
Output positive
1
-R
R
0
Output signal Δ
u
D
(
nT
)
(b)
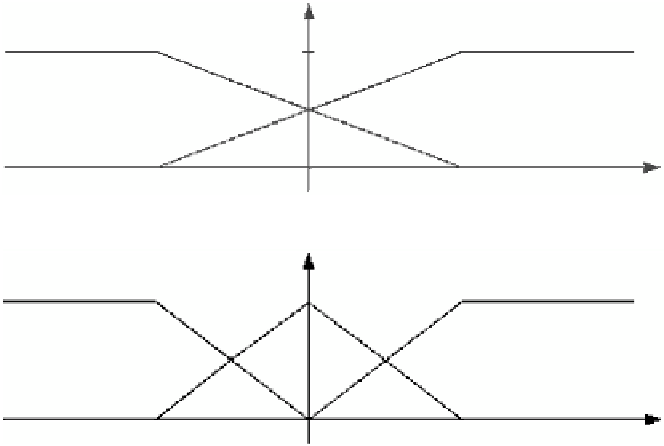
Figure D.2
(a). Input. membership. function. and. (b). output. membership. function. for. the. D. component..
(From. Tang,. K.. S.,. Man,. K.. F.,. Chen,. G.,. Kwong,. S.,. An. optimal. fuzzy. PID. controller,.
IEEE
TransactionsonIndustrialElectronics
,.48(4),.757-765,.2001.)
D
(
)
where.the.regions.are.speciied.as.in
.
Figure.D.3a
..
Similarly,.
u nT
∆
.can.be.
computed.as
R Ky nT K y nT
R y nT
R Ky nT
[
(
)
−
∆
(
)]
d
d
in
Ω
,
Ω
,
Ω
,
Ω
1
2
5
6
2(2
| (
)|)
−
d
[
(
)
−
K y nT
∆
(
)]
d
d
in
Ω
,
Ω
,
Ω
,
Ω
3
4
7
8
2(2
R K
−
| (
∆
y nT
)|)
d
1
2
[
−
K y nT
∆
(
)
+
R
]
in
Ω
,
Ω
d
9
10
1
2
[
y nT
(
)
−
R
]
in
Ω
,
Ω
(
)
∆
u nT
=
d
11
12
D
.
(D.3)
1
2
[
−
K y nT
∆
(
)
−
R
]
in
Ω
,
Ω
d
13
14
1
2
[
y nT
(
)
+
R
]
in
Ω
,
Ω
d
15
16
0
in
Ω
,
Ω
17
19
−
R
R
in
in
Ω
Ω
18
20
.
where.the.regions.are.speciied.as.in.
Figure.D.3b
.






Search WWH ::

Custom Search