Biomedical Engineering Reference
In-Depth Information
Brake
20
Gear (rotation)
15
Slider crank
10
5
Transfer Device
0
Grasping Unit
DC Motor(rotation)
-5
0
2
4
6
8
10
12
14
Stepping motor
a)
b)
Time (sec)
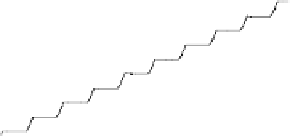
Figure 1.17
(a) LSM slave device by Arai
et al
. (b) Catheter displacement
while driven with the LSM [53].
6mm/cycle
Rotation
Catheter
Extraction
3.5mm/cycle
1.5mm/cycle
0.1mm/cycle
Insertion
Time (sec)
a)
b)
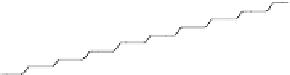
Figure 1.18
(a) LSM2 slave device by Ikeda
et al
. [54]. (b) Catheter
displacement while driven with the LSM2 [54].
C
V
, M
V
Torque
Controller
f
stip
f
s
Force Sensor (Catheter tip)
Force Sensor
Position
Controller
Slave
Master
x
M
, x
M
Position
Sensor
+
Position
Sensor
x
M
x
S
Environment
Operator
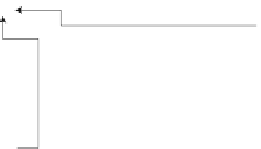
Figure 1.19
Force relecting system for catheter tele-operation.
































































































































































































Search WWH ::

Custom Search